
【雕爷学编程】Arduino动手做(108)---GY-521三轴传感器模块之实验开源 Linkboy 仿真编程三案例
雕爷学编程,Arduino动手做,开源硬件,创客传感器,GY-521三轴模块模块
·

37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百零八:MPU-6050模块 三轴加速度 电子陀螺仪6DOF GY-521传感器(三轴陀螺仪 + 三轴加速度)

模块电原理图

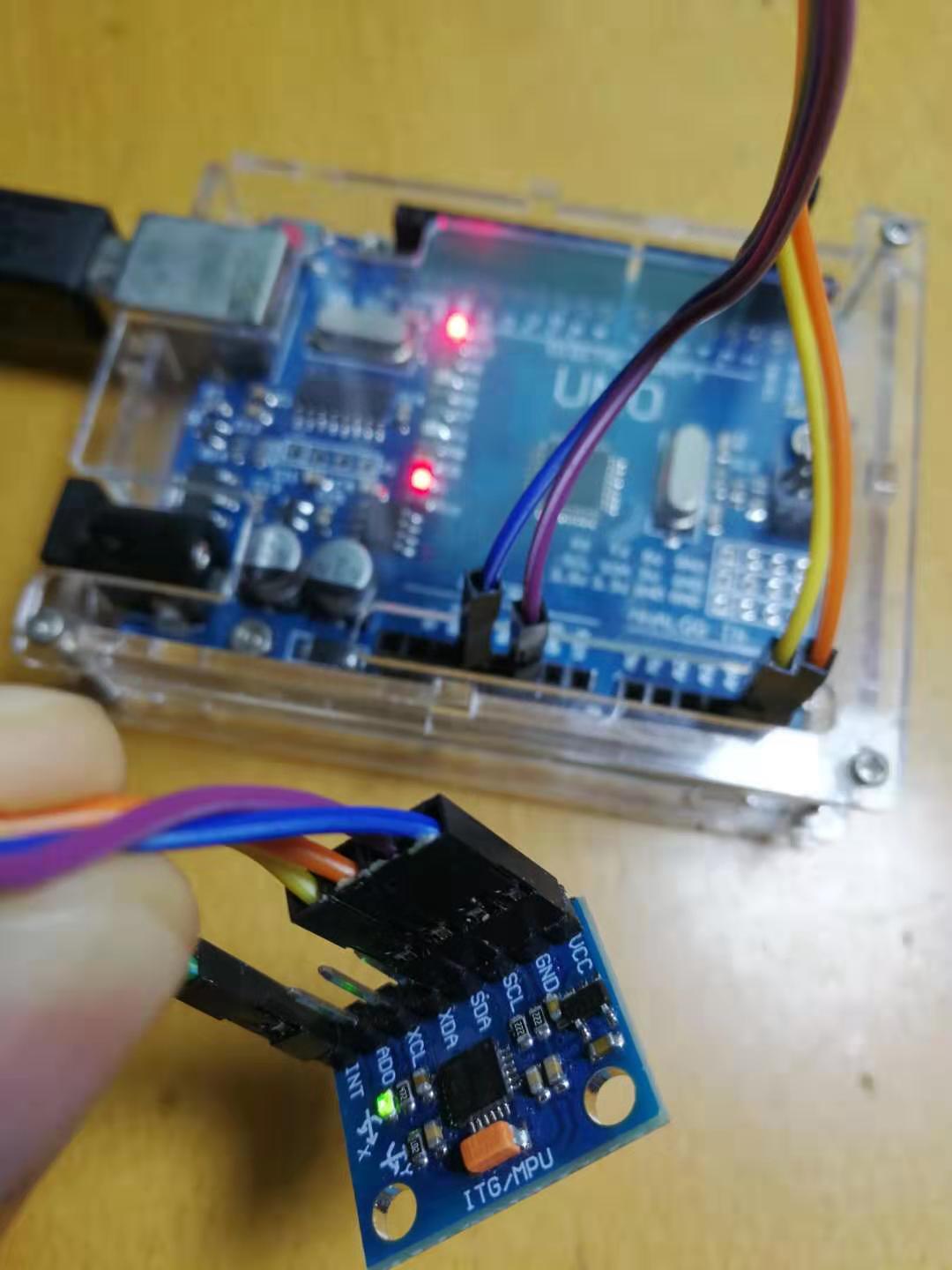
实验接线示意图

【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百零八:MPU-6050模块 三轴加速度 电子陀螺仪6DOF GY-521传感器(三轴陀螺仪 + 三轴加速度)
项目之一:测试MPU6050示例
实验接线:
Arduino------MPU 6050
5V-------------VCC
GND-----------GND
A4-----------SDA IIC 数据线
A5-----------SCL IIC 时钟线
D2-----------INT 中断脚
/*
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百零八:MPU-6050模块 三轴加速度 电子陀螺仪6DOF GY-521传感器(三轴陀螺仪 + 三轴加速度)
项目之一:测试MPU6050示例
实验接线:
Arduino------MPU 6050
5V-------------VCC
GND-----------GND
A4-----------SDA IIC 数据线
A5-----------SCL IIC 时钟线
D2-----------INT 中断脚
*/
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
//#include "MPU6050.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 mpu;
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false;
uint8_t mpuIntStatus;
uint8_t devStatus;
uint16_t packetSize;
uint16_t fifoCount;
uint8_t fifoBuffer[64];
Quaternion q;
VectorInt16 aa;
VectorInt16 aaReal;
VectorInt16 aaWorld;
VectorFloat gravity;
float euler[3];
float ypr[3];
uint8_t teapotPacket[14] = { '
, 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false;
void dmpDataReady() {
mpuInterrupt = true;
}
void setup() {
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(115200);
while (!Serial);
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
Serial.println(F("\nSend any character to begin DMP programming and demo: "));
while (Serial.available() && Serial.read());
while (!Serial.available());
while (Serial.available() && Serial.read());
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788);
if (devStatus == 0) {
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
packetSize = mpu.dmpGetFIFOPacketSize();
}
else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
// configure LED for output
pinMode(LED_PIN, OUTPUT);
}
void loop() {
if (!dmpReady) return;
while (!mpuInterrupt && fifoCount < packetSize) {
}
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
fifoCount = mpu.getFIFOCount();
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
} else if (mpuIntStatus & 0x02) {
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
mpu.getFIFOBytes(fifoBuffer, packetSize);
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_QUATERNION
mpu.dmpGetQuaternion(&q, fifoBuffer);
Serial.print("quat\t");
Serial.print(q.w);
Serial.print("\t");
Serial.print(q.x);
Serial.print("\t");
Serial.print(q.y);
Serial.print("\t");
Serial.println(q.z);
#endif
#ifdef OUTPUT_READABLE_EULER
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetEuler(euler, &q);
Serial.print("euler\t");
Serial.print(euler[0] * 180/M_PI);
Serial.print("\t");
Serial.print(euler[1] * 180/M_PI);
Serial.print("\t");
Serial.println(euler[2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_YAWPITCHROLL
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr\t");
Serial.print(ypr[0] * 180/M_PI);
Serial.print("\t");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t");
Serial.println(ypr[2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_REALACCEL
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
Serial.print("areal\t");
Serial.print(aaReal.x);
Serial.print("\t");
Serial.print(aaReal.y);
Serial.print("\t");
Serial.println(aaReal.z);
#endif
#ifdef OUTPUT_READABLE_WORLDACCEL
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
mpu.dmpGetLinearAccelInWorld(&aaWorld, &aaReal, &q);
Serial.print("aworld\t");
Serial.print(aaWorld.x);
Serial.print("\t");
Serial.print(aaWorld.y);
Serial.print("\t");
Serial.println(aaWorld.z);
#endif
#ifdef OUTPUT_TEAPOT
teapotPacket[2] = fifoBuffer[0];
teapotPacket[3] = fifoBuffer[1];
teapotPacket[4] = fifoBuffer[4];
teapotPacket[5] = fifoBuffer[5];
teapotPacket[6] = fifoBuffer[8];
teapotPacket[7] = fifoBuffer[9];
teapotPacket[8] = fifoBuffer[12];
teapotPacket[9] = fifoBuffer[13];
Serial.write(teapotPacket, 14);
teapotPacket[11]++;
#endif
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
delay(1000);
}
}
实验串口返回情况

串口提示的翻译(未接D2时)
正在初始化I2C设备…
正在测试设备连接…
MPU6050连接成功
发送任意字符开始DMP编程和演示:
正在初始化DMP…
正在启用DMP…
启用中断检测(Arduino外部中断0…)
DMP准备好了!正在等待第一个中断…

实验开源仿真编程(Linkboy V4.63)



实验串口返回情况

橙色、紫色和黑色线为X\Y\Z轴的加速度值,非常敏感,轻轻动下就会大幅变动,数值在-32000到32000之间

实验场景图


瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐
 2
2 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)