
【基于逐飞RT1064开源库3.5.0的MPU6050,DMP的移植与使用】
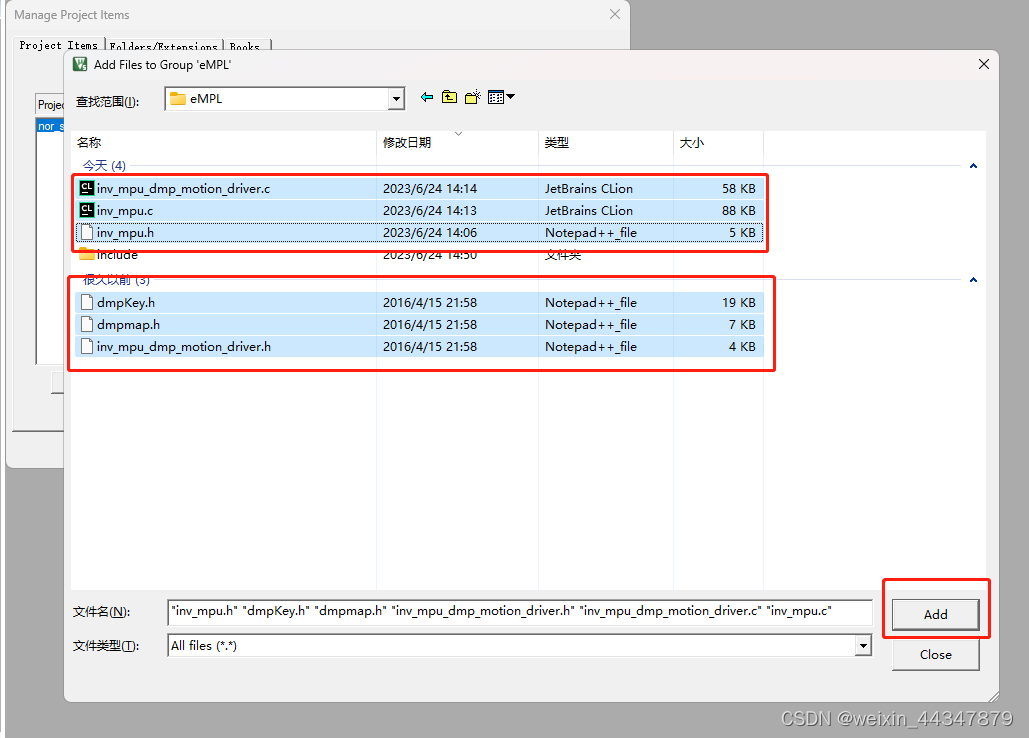
打开keil mdk项目,点击魔法棒配置目录,添加…\code\eMPL与…\code\eMPL\include这两个环境目录,点OK。选中这6个文件点击add,再点close,然后ok。可以看到6个文件已经被添加到项目里了。添加项目文件夹及文件。
·
首先下载相关文件eMPL.zip,解压缩得到eMPL文件夹,将整个eMPL文件夹复制到要移植的工程下的project/code/目录下,包括以下文件: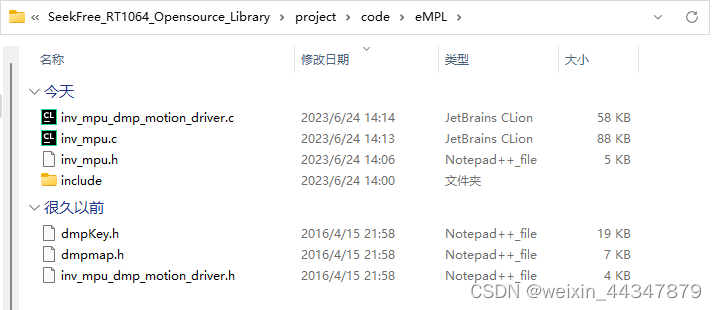
打开keil mdk项目,点击魔法棒配置目录,添加…\code\eMPL与…\code\eMPL\include这两个环境目录,点OK。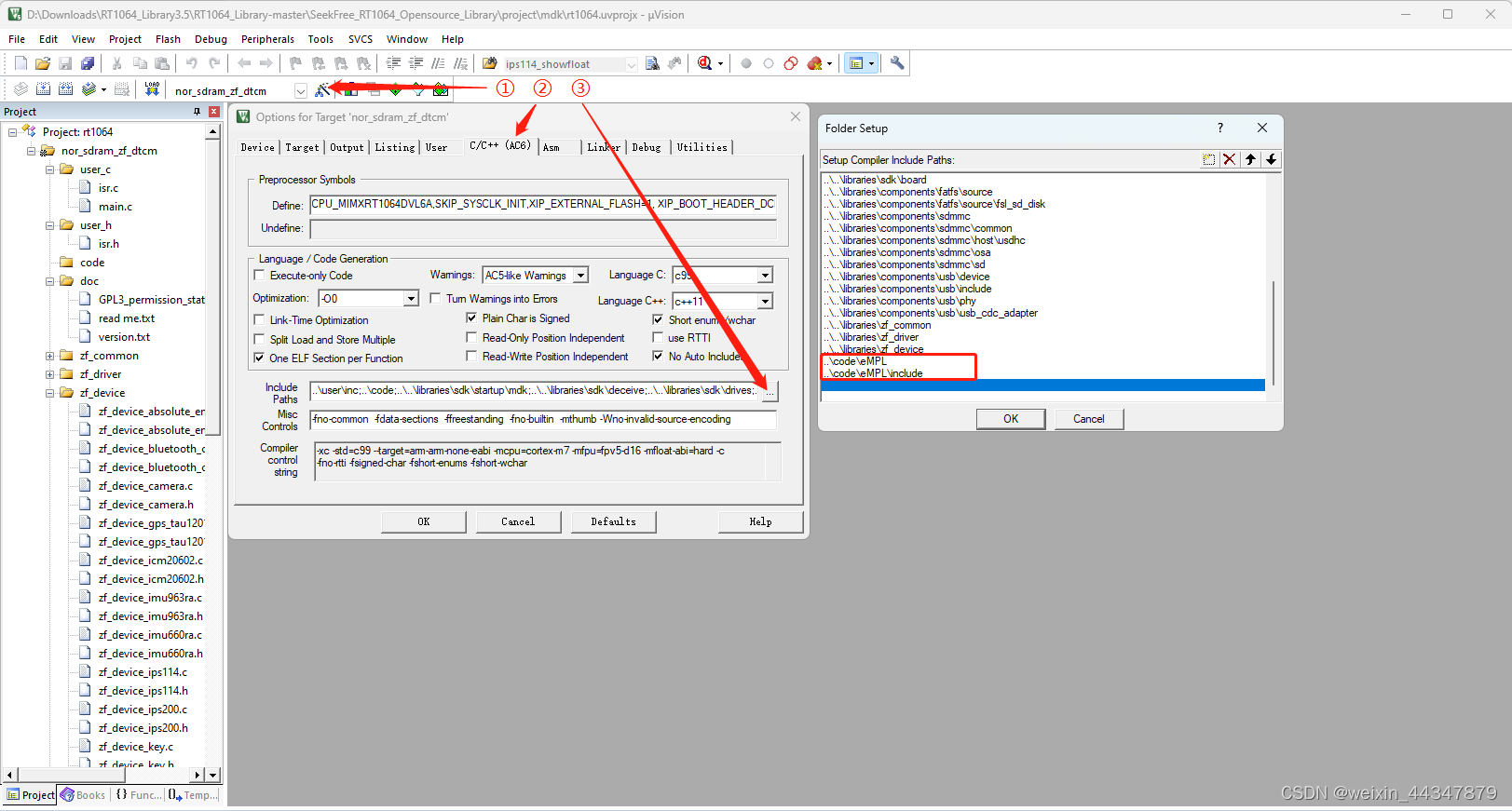
添加项目文件夹及文件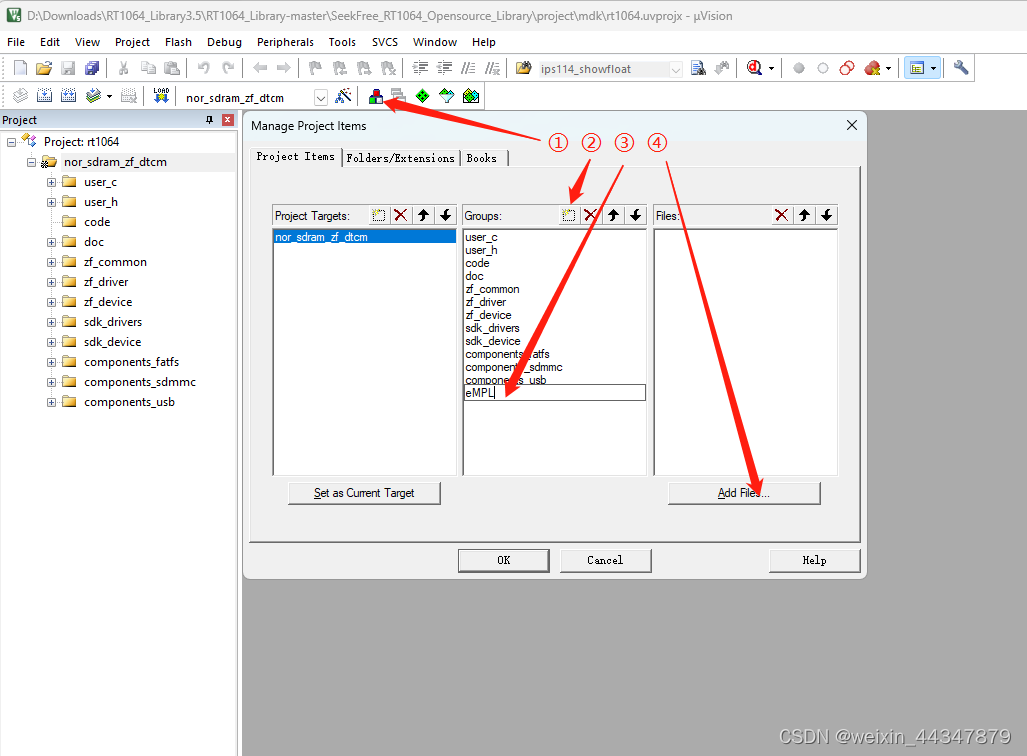
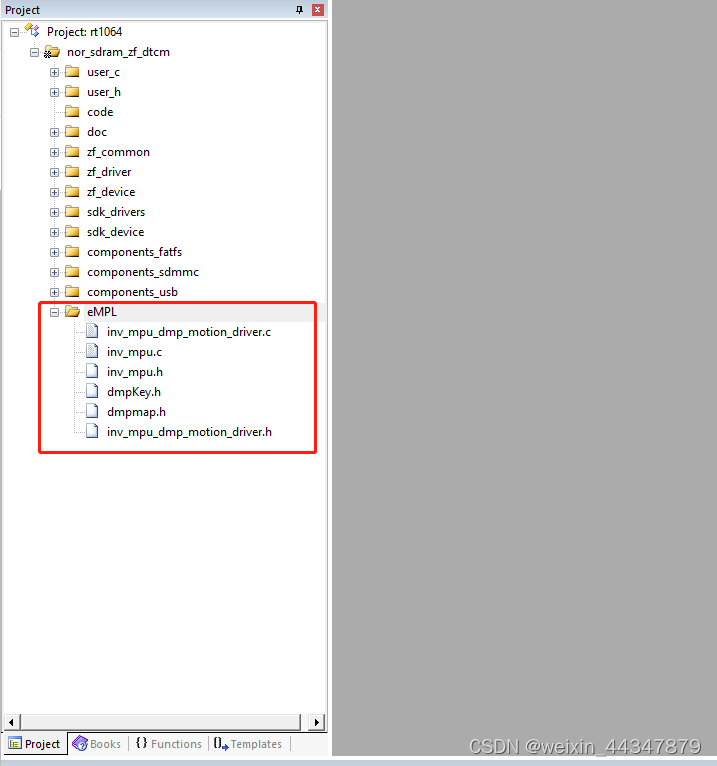
选中这6个文件点击add,再点close,然后ok
可以看到6个文件已经被添加到项目里了
打开zf_driver_soft_iic.c,在最后添加以下内容:
//-------------------------------------------------------------------------------------------------------------------
// @brief GPIO方向设置
// @param pin 选择的引脚 (可选择范围由 common.h 内PIN_enum枚举值确定)
// @param dir 引脚的方向 输出:GPO 输入:GPI
// @return void
// Sample usage: gpio_dir(D0,GPO);//设置D0为输出模式
//-------------------------------------------------------------------------------------------------------------------
void gpio_dir(gpio_pin_enum pin, gpio_dir_enum dir)
{
if (GPI == dir) PORTPTR[pin>>5]->GDIR &= ~(1U << (pin&0x1f));
else PORTPTR[pin>>5]->GDIR |= (1U << (pin&0x1f));
}
#define SEEKFREE_SCL C23 //定义SCL引脚 可任意更改为其他IO
#define SEEKFREE_SDA C22 //定义SDA引脚 可任意更改为其他IO
#define SDA gpio_get_level (SEEKFREE_SDA)
#define SDA0() gpio_low (SEEKFREE_SDA) //IO口输出低电平
#define SDA1() gpio_high (SEEKFREE_SDA) //IO口输出高电平
#define SCL0() gpio_low (SEEKFREE_SCL) //IO口输出低电平
#define SCL1() gpio_high (SEEKFREE_SCL) //IO口输出高电平
#define DIR_OUT() gpio_dir (SEEKFREE_SDA, GPO) //输出方向
#define DIR_IN() gpio_dir (SEEKFREE_SDA, GPI) //输入方向
//-------------------------------------------------------------------------------------------------------------------
// @brief 模拟IIC延时
// @return void
// @since v1.0
// Sample usage: 如果IIC通讯失败可以尝试增加simiic_delay_time的值
//-------------------------------------------------------------------------------------------------------------------
static uint16 simiic_delay_time=100; //ICM等传感器应设置为100
void simiic_delay(void)
{
uint16 delay_time;
delay_time = simiic_delay_time;
while(delay_time--);
}
//内部使用,用户无需调用
void simiic_start(void)
{
SDA1();
SCL1();
simiic_delay();
SDA0();
simiic_delay();
SCL0();
}
//字节发送程序
//发送c(可以是数据也可是地址),送完后接收从应答
//不考虑从应答位
//内部使用,用户无需调用
static int sccb_waitack(void)
{
SCL0();
DIR_IN();
simiic_delay();
SCL1();
simiic_delay();
if(SDA) //应答为高电平,异常,通信失败
{
DIR_OUT();
SCL0();
return 0;
}
DIR_OUT();
SCL0();
simiic_delay();
return 1;
}
void send_ch(uint8 c)
{
uint8 i = 8;
while(i--)
{
if(c & 0x80) SDA1();//SDA 输出数据
else SDA0();
c <<= 1;
simiic_delay();
SCL1(); //SCL 拉高,采集信号
simiic_delay();
SCL0(); //SCL 时钟线拉低
}
sccb_waitack();
}
//主应答(包含ack:SDA=0和no_ack:SDA=0)
//内部使用,用户无需调用
void simiic_sendack(unsigned char ack_dat)
{
SCL0();
simiic_delay();
if(ack_dat) SDA0();
else SDA1();
SCL1();
simiic_delay();
SCL0();
simiic_delay();
}
//字节接收程序
//接收器件传来的数据,此程序应配合|主应答函数|使用
//内部使用,用户无需调用
uint8 read_ch(uint8 ack_x)
{
uint8 i;
uint8 c;
c=0;
SCL0();
simiic_delay();
SDA1();
DIR_IN(); //置数据线为输入方式
for(i=0;i<8;i++)
{
simiic_delay();
SCL0(); //置时钟线为低,准备接收数据位
simiic_delay();
SCL1(); //置时钟线为高,使数据线上数据有效
simiic_delay();
c<<=1;
if(SDA)
{
c+=1; //读数据位,将接收的数据存c
}
}
DIR_OUT();
SCL0();
simiic_delay();
simiic_sendack(ack_x);
return c;
}
//内部使用,用户无需调用
void simiic_stop(void)
{
SDA0();
SCL0();
simiic_delay();
SCL1();
simiic_delay();
SDA1();
simiic_delay();
}
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
uint8_t MPU_Write_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
uint8_t i;
simiic_start();
send_ch((addr<<1)|0);//发送器件地址+写命令
send_ch(reg); //写寄存器地址
for(i=0;i<len;i++)
{
send_ch(buf[i]); //发送数据
}
simiic_stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
uint8_t MPU_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
simiic_start();
send_ch((addr<<1)|0);//发送器件地址+写命令
send_ch(reg); //写寄存器地址
simiic_start();
send_ch((addr<<1)|1);//发送器件地址+读命令
while(len)
{
if(len==1)*buf=read_ch(0); //读数据,发送nACK
else *buf=read_ch(1); //读数据,发送ACK
len--;
buf++;
}
simiic_stop(); //产生一个停止条件
return 0;
}
打开zf_driver_soft_iic.h,在#endif前添加以下内容:
uint8_t MPU_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf);
uint8_t MPU_Write_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf);
打开main.c,编写代码如下:
#include "zf_common_headfile.h"
#include "inv_mpu.h"
// 打开新的工程或者工程移动了位置务必执行以下操作
// 第一步 关闭上面所有打开的文件
// 第二步 project->clean 等待下方进度条走完
// 本例程是开源库移植用空工程
int main(void)
{
clock_init(SYSTEM_CLOCK_600M); // 不可删除
debug_init(); // 调试端口初始化
// 此处编写用户代码 例如外设初始化代码等
float pitch=0,roll=0,yaw=0; //欧拉角
mpu6050_init();
ips114_init();
while(mpu_dmp_init()!=0)
{
ips114_show_string(0,0,"dmp-error");
}
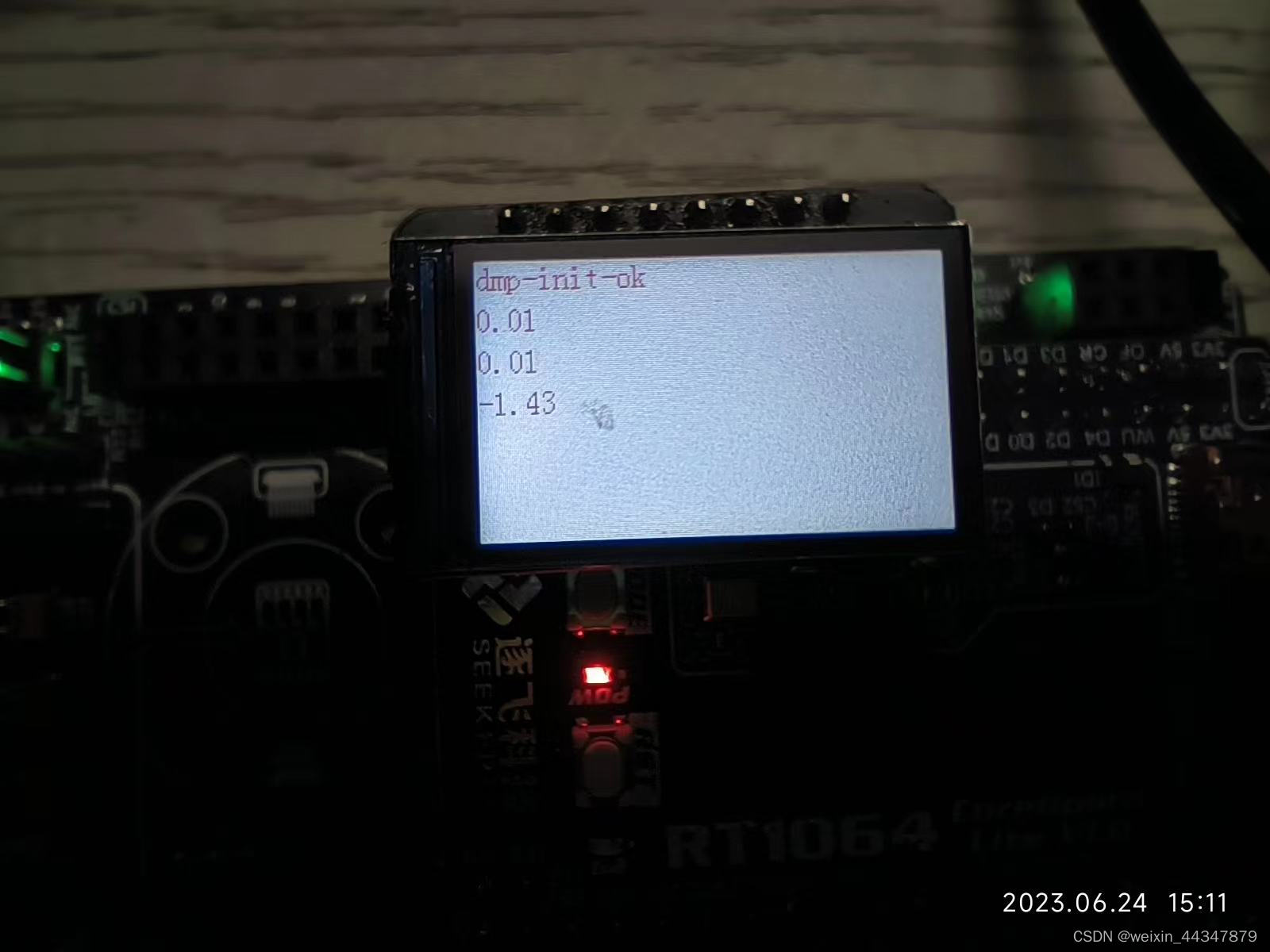
ips114_show_string(0,0,"dmp-init-ok");
while (1)
{
//此处编写需要循环执行的代码
mpu_dmp_get_data(&pitch,&roll,&yaw);
ips114_show_float(0,20,pitch,3,2);
ips114_show_float(0,40,roll,3,2);
ips114_show_float(0,60,yaw,3,2);
system_delay_ms(5);
}
}
最后编译烧录即可。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)