基于STM32开源:磁流体蓝牙音箱(包含源码+PCB)
基于STM32F103C8T6最小系统板做的磁流体蓝牙音箱项目,可以竞赛毕设,这个项目是我们在21年5月做的,首次公开设计工程,程序,PCB都放在文件夹里面了,源码有注释,下载了资源的伙伴,不懂的,可以私信我进行咨询。.....................
日常·唠嗑
21年6月的时候,那会刚开始创业,跟着合伙人园丁(笔名)在创业的道路上,瞎灯黑火乱摸索,基本上是能跟开发有关合法赚钱的方式(嘿嘿,我这人比较庸俗,就想着赚钱),我们都思考过。为了一个看不见的投资,也是跟着另外三个小伙伴,去外面搞应酬(不过这个经历,也是我们人生中,一个不过珍贵的回忆,即使没拿到第一个投资,但那是我们以一个创业人为自己事业打拼的一件事)。
这创业的过程,我们也像大多数出来创业的年轻技术人员那样去接单子做(俗称接外包赚外快),这个磁流体项目就是我们那会接的单子,21年磁流体音箱项目网上还没有这么多
呸呸呸。尽讲些没用的,直接上视频,看效果进入正文。
一、视频效果
21年6月做的,后面因为找不到投资人,所以没有再进行外包装优化,当时我们还给这个作品起了个中二的名字:毒液音箱(嘿嘿)
STM32:磁流体蓝牙音箱项目开源(源码+PCB)
二、硬件设计
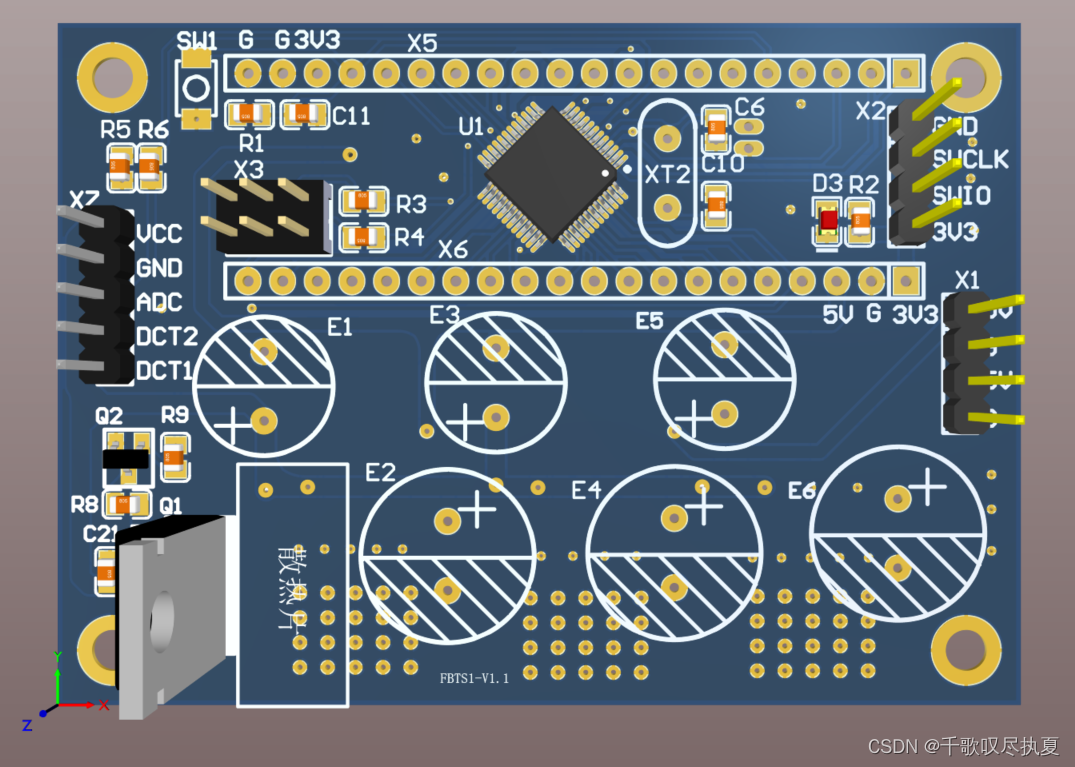
主控器,我们是自己画的最小系统板,板子上有:控制电路+电磁铁电路+电源电路
控制电路:STM32F103C8T6最小系统
电源电路:AMS117电路
电磁铁电路:一个大功率的MOS管做开关电路
除了自己设计的最小系统板外,还需要到某宝买一个蓝牙音箱+一个36V可调电源,这两个东西都可以自己做,但是没必要,网上便宜,性能还稳定,毕竟别人做了这么多年这东西了,还是可以的。
在电磁铁电路,开始,我们相过用大功率三极管做,但是电流实在太大了,工作不到一会,就会严重发烫。后来我三师兄给我介绍了MOS电路,发现就好了。


这个PCB跟原理图,我等会会跟源码放在一起,打包放在文末,有兴趣的,自己下载。
三、程序设计
其实这东西做起来没那么难,有些基础的人都可以做,主要用到FFT算法,我讲一下算法思路:这里我不会讲FFT算法的内容,网上讲解很多,感兴趣的自己去搜。我讲一下,大致原理,在第二大点的硬件设计中,我们用到了一个大功率MOS管做开关电路,其实就是让电磁铁把磁流体吸起来(给电就有磁力就吸起来了,没电没磁力就又掉下去),那么如何做到磁流体随着音乐跳动呢?
其实很简单,就是我们把单片的一个端口,根据音乐的跳动(FFT频率)不断输出PWM信号去控制这个MOS管的开关。(注意:因为电磁铁的电流是很大的,必须很单片机直接做隔绝,所以你可以看到,我设计的板子是有一些大电容跟小三极管做隔绝的)。
主程序: 代码已经做了注释,相信有基础的人都能看懂,没基础的,建议把基础打好,再来搞这项目
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h"
#include "adc.h"
#include "dma.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "stm32_dsp.h"
#include "table_fft.h"
#include "math.h"
#include "oled.h"
#include "config.h"
#include "bg.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
#define NPT 1024//256
#define PI2 6.28318530717959
#define K1 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_4)
#define K2 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_11)
#define K3 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_12)
//采样率计算
//分辨率:Fs/NPT
//#define Fs 10000
#define Fs 25600
//取9984能出来整数的分辨率 9984/256 = 39Hz
#define DCT_0 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9, GPIO_PIN_RESET);
#define DCT_1 HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9, GPIO_PIN_SET);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void Error_Handler(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
void Creat_Single(void);
void GetPowerMag(void);
void Single_Get(void);
void display1(void);
void display2(void);
void Key_Scan(void);
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
uint32_t adc_buf[NPT]={0};
uint8_t DCT_QD_flag;
uint16_t DCT_QD_flag1;
uint32_t error2; //差值
long lBufInArray[NPT];
long error1[NPT/2]={0}; //差值
long lBufOutArray[NPT/2];
long lBufMagArray[NPT/2];//当前幅值
long lastSpectrum[NPT/2];//上一次幅值 差值处理使用
uint8_t ucmagarry[37];
#define SPECTRUM_WND_SIZE 10 //窗口数
#define THRESHOLD_WINDOW_SIZE 10 //均值窗口数
#define MULTIPLIER 1.0f //增益系数
uint16_t wndNum = 0;
uint16_t spectralFlux[SPECTRUM_WND_SIZE]; //前后差值
uint16_t threshold[SPECTRUM_WND_SIZE]; //均值阈值
uint16_t peakSpectrum[SPECTRUM_WND_SIZE]; //节拍值
long DCT_error_max; //电磁铁差值最大值
uint8_t DCT_flag=0; //电磁铁工作标志位0开启 1关闭
uint8_t prt = 10; //量化显示的比例
#define SHOW_NUM 4 //显示函数的个数
uint8_t display_num = 1; //控制显示方式的
uint8_t auto_display_flag = 0; //自动切换显示标志 1:自动切换 0:手动
uint8_t fall_pot[128]; //记录下落点的坐标
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t i = 0;
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_ADC1_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
printf("uart test! \r\n");
/*初始化显示*/
GUI_Initialize();
/*设置前景色和背景色 这里用1和0代替*/
GUI_SetColor(1,0);
GUI_LoadPic(0,0,(uint8_t *)&gImage_bg,128,64);
GUI_Exec();
HAL_Delay(3000);
//初始化下落点 把下落的点 初始化为最底部显示
for(i=0;i<128;i++)
fall_pot[i] = 63;
/*启动ADC的DMA传输 配合下面定时器来触发ADC转换*/
HAL_ADC_Start_DMA(&hadc1, adc_buf, NPT);
/*开启定时器 用溢出事件来触发ADC转换*/
HAL_TIM_Base_Start(&htim3);
DCT_QD_flag=0;
DCT_QD_flag1=0;
while (1)
{
// DCT_1;
/**********************************/
if(DCT_QD_flag==1)//有音乐
{
DCT_0;
if (DCT_flag == 0)//开启电磁铁
{
DCT_1;
HAL_Delay(120);
DCT_flag =1;
DCT_0;
}
else
{
DCT_0;
}
HAL_Delay(10);
}
else
{
DCT_1;
}
}
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_PeriphCLKInitTypeDef PeriphClkInit;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV6;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/************FFT相关*****************/
//测试用 生成一个信号
void Creat_Single(void)
{
u16 i = 0;
float fx=0.0;
for(i=0; i<NPT; i++)
{
fx = 2048+2048*sin(PI2 * i * 200.0 / Fs)+
3100*sin(PI2 * i * 502.0 / Fs)+
1300*sin(PI2 * i * 990.0 / Fs);
lBufInArray[i] = ((signed short)fx) << 16;
}
}
//获取FFT后的直流分量
void GetPowerMag(void)
{
signed short lX,lY;
float X,Y,Mag;
unsigned short i;
for(i=0; i<NPT/2; i++)
{
lX = (lBufOutArray[i] << 16) >> 16;
lY = (lBufOutArray[i] >> 16);
//除以32768再乘65536是为了符合浮点数计算规律
X = NPT * ((float)lX) / 32768;
Y = NPT * ((float)lY) / 32768;
Mag = sqrt(X * X + Y * Y)*1.0/ NPT;
if(i == 0)
lBufMagArray[i] = (unsigned long)(Mag * 32768);
else
lBufMagArray[i] = (unsigned long)(Mag * 65536);
}
}
/*柱状显示*/
void display1(void)
{
uint16_t i = 0;
uint8_t x = 0;
uint8_t y = 0;
/*******************显示*******************/
GUI_ClearSCR();
for(i = 0; i < 32; i++) //间隔的取32个频率出来显示
{
x = (i<<2); //i*4
y = 63-(lBufMagArray[x+1]/prt)-2; //加1是为了丢掉第一个直流分量
if(y>63) y = 63;
GUI_LineWith(x,y,x,63,3,1);
//画下落的点
if(fall_pot[i]>y) fall_pot[i] = y;
else
{
if(fall_pot[i]>63) fall_pot[i]=63;
GUI_LineWith(x,fall_pot[i],x,fall_pot[i]+3,3,1);
fall_pot[i] += 2 ;
}
}
GUI_Exec();
}
/*单柱状显示*/
void display2(void)
{
uint16_t i = 0;
uint8_t y = 0;
/*******************显示*******************/
GUI_ClearSCR();
for(i = 1; i < 128; i++)
{
y = 63-(lBufMagArray[i]/prt)-2;
if(y>63) y = 63;
GUI_RLine(i,y,63,1);
//画下落的点
if(fall_pot[i]>y) fall_pot[i] = y;
else
{
if(fall_pot[i]>63) fall_pot[i]=63;
GUI_RLine(i,fall_pot[i],fall_pot[i]+1,1);
fall_pot[i] += 2 ;
}
}
GUI_Exec();
}
/*柱状显示 中间对称*/
void display3(void)
{
uint16_t i = 0;
uint8_t y = 0;
/*******************显示*******************/
GUI_ClearSCR();
for(i = 0; i < 127; i++)
{
y = 31-(lBufMagArray[i+1]/prt)-2; //加1是为了丢掉第一个直流分量
if(y>31) y = 31;
GUI_RLine(i,32,y,1);
GUI_RLine(i,32,63-y,1);
//画下落的点
if(fall_pot[i]>y) fall_pot[i] = y;
else
{
if(fall_pot[i]>30) fall_pot[i]=30;
GUI_RLine(i,fall_pot[i],fall_pot[i]+1,1);
GUI_RLine(i,63-fall_pot[i],63-(fall_pot[i]+1),1);
fall_pot[i] += 2 ;
}
}
GUI_Exec();
}
/*单柱状显示 中间对称*/
void display4(void)
{
uint16_t i = 0;
uint8_t x = 0;
uint8_t y = 0;
/*******************显示*******************/
GUI_ClearSCR();
for(i = 0; i < 32; i++) //间隔的取32个频率出来显示
{
x = (i<<2); //i*4
y = 31-(lBufMagArray[x+1]/prt)-2; //加1是为了丢掉第一个直流分量
if(y>31) y = 31;
GUI_LineWith(x,y,x,32,3,1);
GUI_LineWith(x,63-y,x,32,3,1);
//画下落的点
if(fall_pot[i]>y) fall_pot[i] = y;
else
{
if(fall_pot[i]>31) fall_pot[i]=31;
GUI_LineWith(x,fall_pot[i],x,fall_pot[i]+3,3,1);
GUI_LineWith(x,63 - fall_pot[i],x,63 - fall_pot[i]-3,3,1);
fall_pot[i] += 2 ;
}
}
GUI_Exec();
}
//ADC DMA传输中断
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc)
{
uint16_t i = 0,m=0;
uint32_t flux = 0;
int start,end,j;
float mean;
static uint16_t num = 0;
// printf("adc dma interrupt \r\n");
HAL_ADC_Stop_DMA(&hadc1); //完成一次测量 关闭DMA传输
//填充数组
for(i=0;i<NPT;i++)
lBufInArray[i] = ((signed short)(adc_buf[i]-2048)) << 16; //这里因为单片机的ADC只能测正的电压 所以需要前级加直流偏执
//加入直流偏执后 软件上减去2048即一半 达到负半周期测量的目的
//
for(i=0;i<NPT-1;i++)
{
// printf("i:%3d,%10d\r\n", i,adc_buf[i]);
// printf("i:%3d,%.1f\r\n", i,(float)adc_buf[i]/4096*3.3);
if(adc_buf[i+1]>adc_buf[i])
{
error2=adc_buf[i+1];
}
}
if(error2>992)//说明音乐启动
{
DCT_QD_flag=1;//有音乐
}
else
{
DCT_QD_flag1++;
if(DCT_QD_flag1>25)
{
DCT_QD_flag1=0;
DCT_QD_flag=0;
}
}
// if(error2>500)//说明音乐启动
// {
// DCT_QD_flag=1;//有音乐
// }
// else
// {
// DCT_QD_flag=0;
// }
cr4_fft_1024_stm32(lBufOutArray, lBufInArray, NPT); //FFT变换
// cr4_fft_256_stm32(lBufOutArray, lBufInArray, NPT);
GetPowerMag(); //取直流分量对应的AD值
// DCT_flag=1; //关闭电磁铁
/***********求差值******************/
for(i=0;i<NPT/2;i++)
{
if(lBufMagArray[i]<0.05)
{
lBufMagArray[i]=0;
}
}
for(i=0;i<NPT/2;i++)
{
error1[i]=lBufMagArray[i]-lastSpectrum[i];
if(error1[i]<0)
{
error1[i]=0;
}
// printf("i:%3d, f:%.2f, Power:%10d\r\n", i, (float)i*Fs/NPT, error1[i]);
}
for(i=0;i<NPT/2;i++)
{
lastSpectrum[i] = lBufMagArray[i]; //上次幅值赋值
}
for(i=400;i<NPT/2-1;i++)
{
if (error1[i+1]>error1[i])
{
DCT_error_max=error1[i+1];
}
else
{
DCT_error_max=0;
}
}
/************************判断是否开启电磁铁************************************/
if (DCT_error_max>=5)
{
DCT_flag=0; //开启电磁铁
}
else
{
DCT_flag=1; //关闭电磁铁
}
//自动显示
if(auto_display_flag == 1)
{
if(num>300)
{
num = 0;
display_num ++;
if(display_num>SHOW_NUM) display_num = 1;
}
}
num++;
//显示
switch(display_num)
{
case 1:
display1();
break;
case 2:
display2();
break;
case 3:
display3();
break;
case 4:
display4();
break;
default:
display3();
break;
}
HAL_ADC_Start_DMA(&hadc1, adc_buf, NPT);
}
void Key_Scan(void)
{
static uint8_t mode_num = 0;
if(K1 == RESET)
{
HAL_Delay(10);
if(K1 == RESET)
{
while(!K1);
mode_num=!mode_num;
if(mode_num == 1) //自动显示模式
{
auto_display_flag = 1;
GUI_PutString(0,0,"Auto");
GUI_Exec();
}
else //正常显示模式 手动切换效果
{
auto_display_flag = 0;
GUI_PutString(0,0,"Manual");
GUI_Exec();
}
}
}
if(K2 == RESET)
{
HAL_Delay(10);
if(K2 == RESET)
{
while(!K2);
if(mode_num == 0) //手动模式
{
display_num ++;
if(display_num > SHOW_NUM) display_num = 1;
}
}
}
if(K3 == RESET)
{
HAL_Delay(10);
if(K3 == RESET)
{
while(!K3);
if(mode_num == 0) //手动模式
{
if(display_num == 1) display_num = SHOW_NUM+1;
display_num --;
}
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
ADC程序:
/* Includes ------------------------------------------------------------------*/
#include "adc.h"
#include "gpio.h"
#include "dma.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
ADC_HandleTypeDef hadc1;
DMA_HandleTypeDef hdma_adc1;
/* ADC1 init function */
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig;
/**Common config
*/
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_EXTERNALTRIGCONV_T3_TRGO;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/**Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspInit 0 */
/* USER CODE END ADC1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_ADC1_CLK_ENABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
*/
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* Peripheral DMA init*/
hdma_adc1.Instance = DMA1_Channel1;
hdma_adc1.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_adc1.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_adc1.Init.MemInc = DMA_MINC_ENABLE;
hdma_adc1.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_adc1.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_adc1.Init.Mode = DMA_CIRCULAR;
hdma_adc1.Init.Priority = DMA_PRIORITY_LOW;
if (HAL_DMA_Init(&hdma_adc1) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(adcHandle,DMA_Handle,hdma_adc1);
/* USER CODE BEGIN ADC1_MspInit 1 */
/* USER CODE END ADC1_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC1)
{
/* USER CODE BEGIN ADC1_MspDeInit 0 */
/* USER CODE END ADC1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC1_CLK_DISABLE();
/**ADC1 GPIO Configuration
PA0-WKUP ------> ADC1_IN0
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_0);
/* Peripheral DMA DeInit*/
HAL_DMA_DeInit(adcHandle->DMA_Handle);
}
/* USER CODE BEGIN ADC1_MspDeInit 1 */
/* USER CODE END ADC1_MspDeInit 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
四、工程获取
1、直接在平台下载: 基于STM32:磁流体蓝牙音箱(源码工程+PCB+原理图)

五、专利
关于磁流体蓝牙音箱,本团队已经申请了专利(已授权下证),本团队有成熟的技术,有兴趣的朋友私信我们可以合作。

开放原子开发者工作坊旨在鼓励更多人参与开源活动,与志同道合的开发者们相互交流开发经验、分享开发心得、获取前沿技术趋势。工作坊有多种形式的开发者活动,如meetup、训练营等,主打技术交流,干货满满,真诚地邀请各位开发者共同参与!
更多推荐
 28
28 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)