
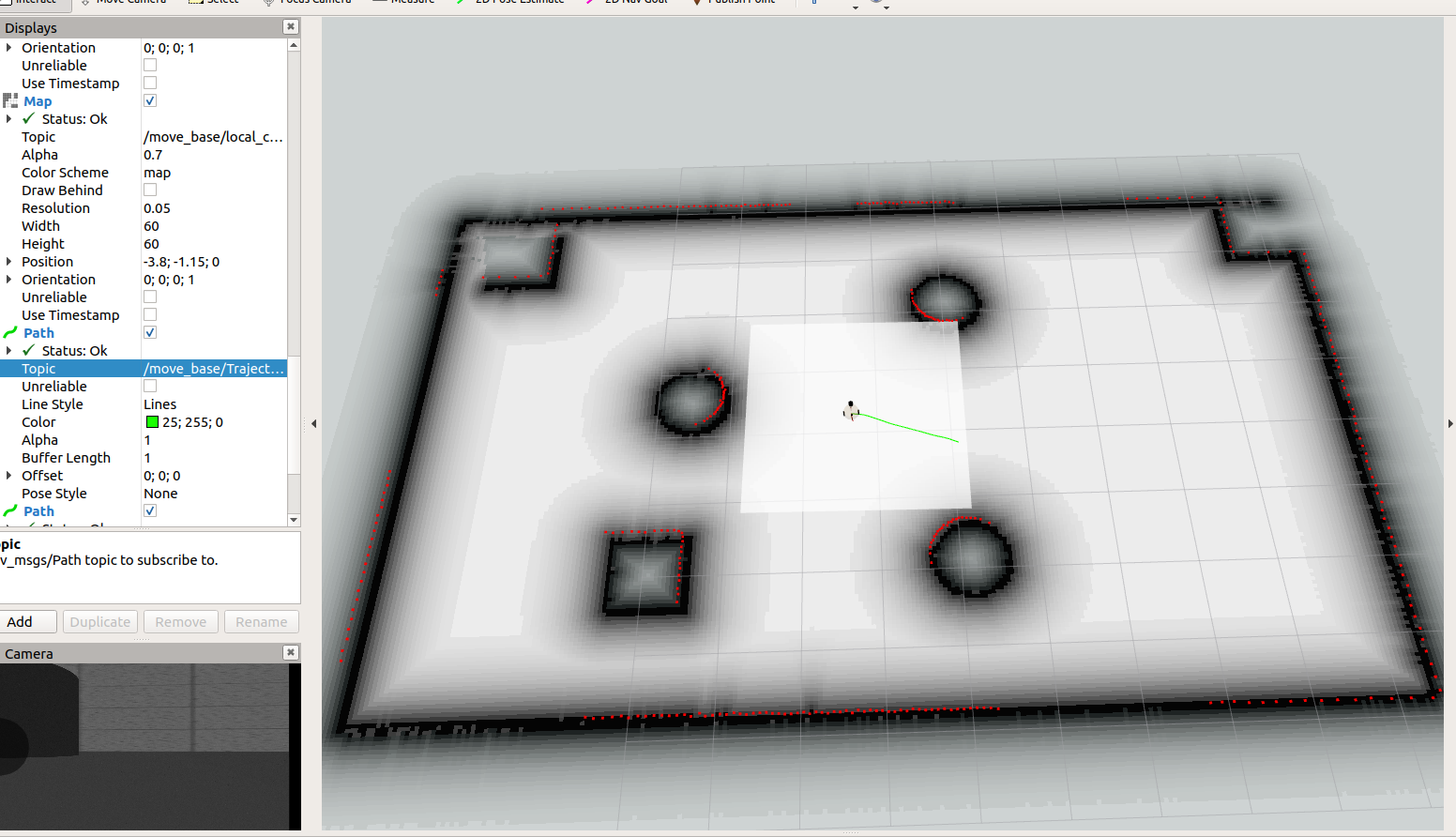
二维路径规划gazebo仿真(附github)
只包含了配置文件,包括urdf、yaml、launch文件等,因为不需要c++或python源码,其他支持包均可在github下载。
·
环境
参考http://www.autolabor.com.cn/book/R
安装好环境
三.开发记录之移动硬盘装ubuntu系统的配置、环境、各类软件安装和备份等_goldqiu的博客-CSDN博客
四.开发记录之ubuntu系统安装ROS和开发环境_goldqiu的博客-CSDN博客
五.开发记录之ubuntu系统安装各个软件_goldqiu的博客-CSDN博客
相关博客:
一.路径规划---二维路径规划仿真实现-gmapping+amcl+map_server+move_base_goldqiu的博客-CSDN博客
二.路径规划---二维路径规划实车实现---gmapping+amcl+map_server+move_base_goldqiu的博客-CSDN博客
github 链接:
GitHub - goldqiu/Gazebo_2D_Simulation: Gazebo二维路径规划仿真代码。
注:
只包含了配置文件,包括urdf、yaml、launch文件等,因为不需要c++或python源码,其他支持包均可在github下载。

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐
 1
1 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)