
自动驾驶 4-4 纵向车辆建模Longitudinal Vehicle Modeling
vehicle acceleration:汽车加速度aerodynamic forces:空气动力gravitational force due to the road inclination:万有引力, 因为斜坡turbine: 涡轮longitudinal velocity:纵向速度transmission gear box:变速箱,传动齿轮箱torque converter clutch:扭
vehicle acceleration:汽车加速度
aerodynamic forces:空气动力
gravitational force due to the road inclination:万有引力, 因为斜坡
turbine: 涡轮
longitudinal velocity:纵向速度
transmission gear box:变速箱,传动齿轮箱
torque converter clutch:扭力转换器离合器
rotational coupling:转动耦合,旋转耦合
在本课中,我们将介绍车辆纵向动力学的概念, 以及在轮胎上产生扭矩所需的动力传动系统组件模型。
到本视频结束时, 你将能够:定义平衡 沿纵向作用在车辆上的动态力, 描述内燃机车辆的典型动力传动系统组件模型, 并将典型的动力传动组件模型连接到 形成纵向运动的完整车辆模型。 这些模型将帮助我们建立 本课程下一个模块中的纵向控制器。 那么,让我们开始吧。
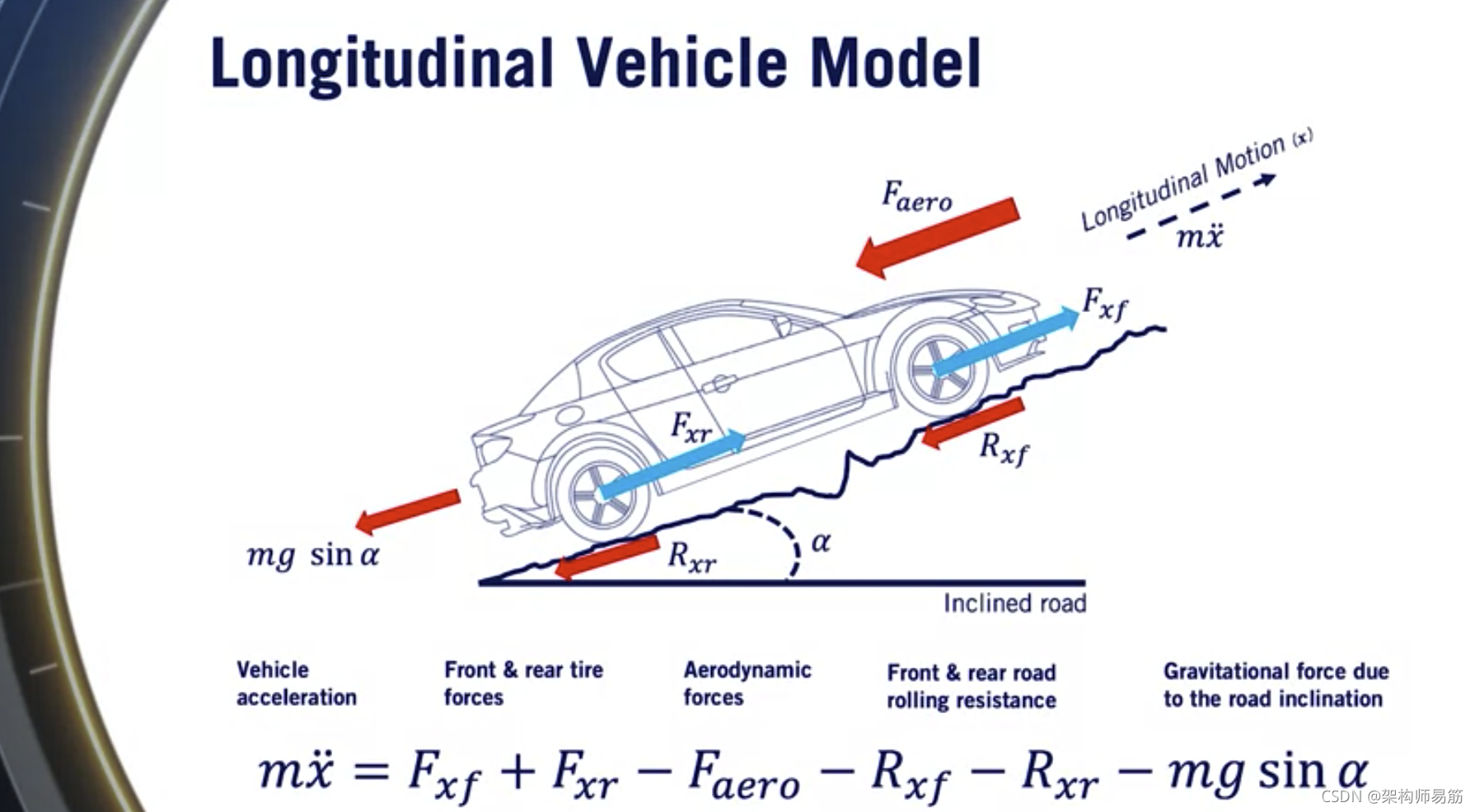
纵向车辆动力学模型很简单 基于产生向前运动的车辆动力学。 这是一个典型的车辆在倾斜道路上的纵向运动。
作用在车辆上的力或前后轮胎力 Fxf 和 Fxr。
气动阻力 F aero 和滚动阻力 Rxf 和 Rxr。
还有重力 mg sine alpha 引起的力,其中 alpha 是当地的道路坡度。
根据牛顿第二定律, 前后轮胎的纵向轮胎力 Fxf 和 Fxr, 来自车辆动力系统的必须克服 阻力,如空气动力 F aero,
引力mg正弦α, 以及前后轮胎的滚动阻力,Rxf和Rxr。
这些力之间的不平衡定义了加速度 车辆在纵向方向上用 X 双点表示。
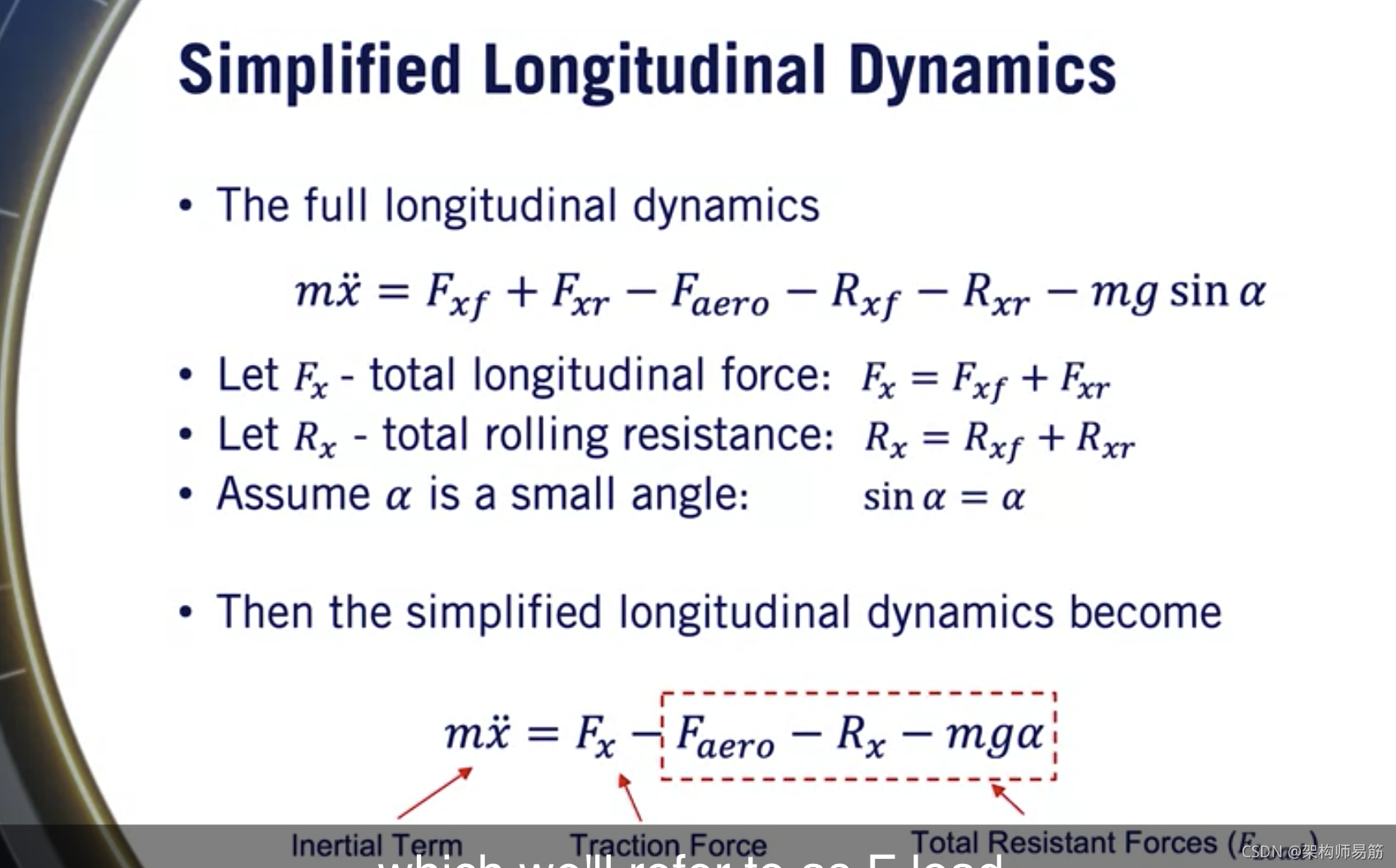
纵向动力学方程可以通过分组前沿进一步简化 后轮胎力为 Fx,前后滚动阻力为 Rx。
此外,我们可以假设道路倾斜度适中, 这意味着可以应用小角度近似。 因此,alpha 的正弦值大约等于 alpha。
我们的汽车纵向运动的基本动力学模型为 如下: Mx 双点等于 Fx 减去 F aero, 减去 Rx,减去 mg alpha。
这里 MX 双点是惯性项 定义车辆纵向加速度。
Fx 是动力传动系产生的牵引力, 和 F aero, Rx, 和 mg alpha 构成了作用在车辆上的总阻力, 我们将其称为 F 负载。
请注意,我们仍然需要为这个方程中的每个力开发模型,并且 定义它们如何连接到油门和 中断我们的自治系统将应用的输入。
通过本视频的其余部分, 我们将开发这些模型, 我们将在后续视频中更深入地介绍特定方面,例如, 动力传动系、断裂和轮胎力建模。
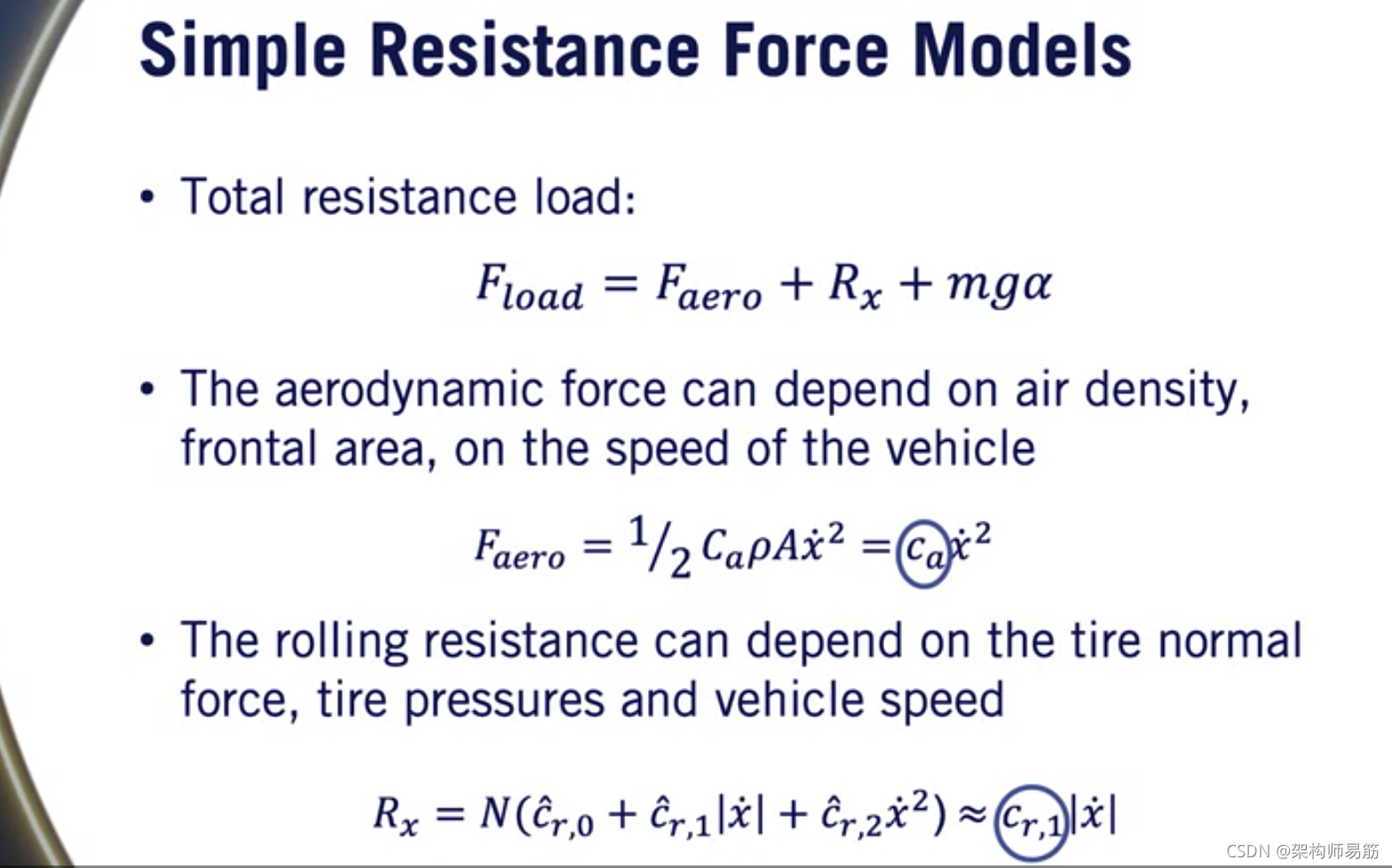
现在让我们为汽车上的阻力建立一些简单的模型。 车辆纵向运动为 受到空气动力阻力滚动阻力和重力产生的力的抵抗。
我们已经建立了重力影响的模型, 所以让我们继续讨论空气动力学。
气动阻力通常可以建模为取决于空气密度, 车辆的前部区域, 车辆摩擦系数, 以及车辆的当前速度。
给定固定的车辆形状和标准大气压, 我们可以定义一个简单的气动阻力 C alpha 的集总系数, 并将其乘以速度的平方得到阻力。
对于滚动阻力,我们有一个类似的模型,它可以取决于法向力, 轮胎压力和特性,以及车速。
如果我们再次假设 标称工作条件并为简单起见去掉二阶项, 我们可以得到一个线性滚动阻力模型, 其中 Cr1 是我们的线性滚动阻力系数。
在这两种情况下,这些都是 基本的近似模型是控制器设计的良好起点。 在实践中,所用模型的保真度取决于 控制器或模拟环境所需的精度。
现在我们有了作用在车辆上的阻力模型, 让我们更仔细地看看车辆动力传动系统产生的干力。
克服阻力产生的力量来自动力传动系统, 并且可以建模为由一系列组件生成。
由于汽油或柴油发动机燃烧而产生的电力, 或电动汽车或混合动力汽车电池中的电化学反应, 流过传动系并最终为车轮提供扭矩。
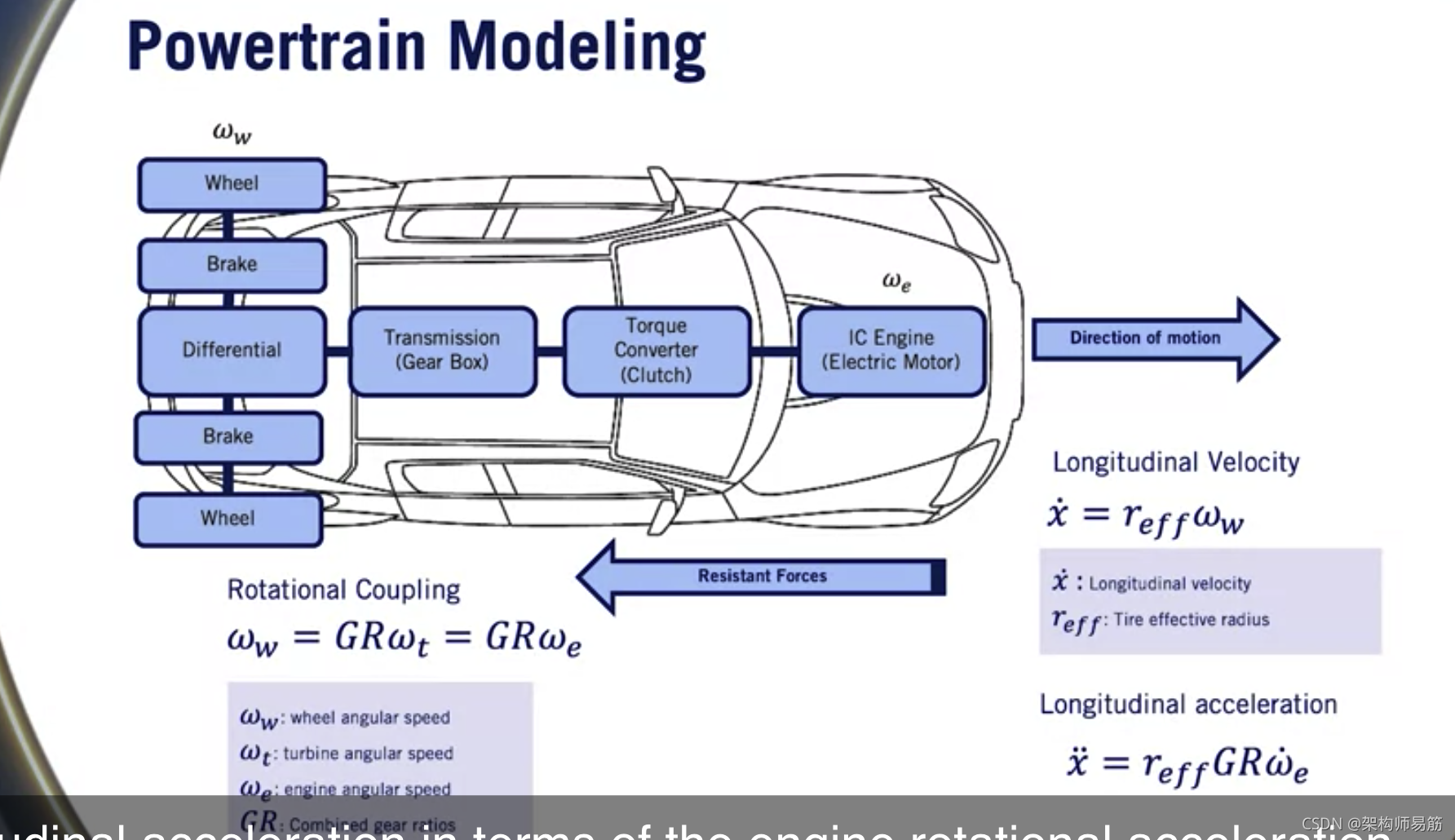
传动系是指发动机和车轮之间的部件顺序, 通常包括变矩器或离合器, 变速箱或变速箱, 最后是微分。
休息时间也包括在这个图中, 并可直接在轮毂上提供阻力矩。 由于挂档时车轮和发动机直接相连, 可以建模之间的关系 车轮速度和发动机速度作为运动学约束。
车轮转速ω w 根据变矩器涡轮速度 omega t 变化, 通过几个齿轮比,包括 变矩器、变速箱和差速器。 该组合传动比表示为 GR 并根据动力传动系部件的状态而变化。
那么,例如,变速箱处于什么档位? 发动机转速等于涡轮转速,可以互换使用。
车辆前进速度也正比于 车轮角速度乘以轮胎有效半径, 我们主要将其建模为固定的轮胎半径。
然而,它可以被修改为基于更高保真度的建模 由于作用在汽车上的力和力矩而导致轮胎的预期变形。
假设有效轮胎半径已知, 我们可以写出纵向车速 x dot 等于 轮胎半径 R 有效乘以车轮速度 omega w。
所以,如果我们可以模拟发动机转速的动力学, 然后我们可以通过这些运动学约束将其直接与车辆速度联系起来。
这个速度表达式可以微分得到 根据发动机旋转加速度的纵向加速度。
现在,让我们来看看每个的动力学方程 动力传动系组件构建整体动力传动系的动力学模型。
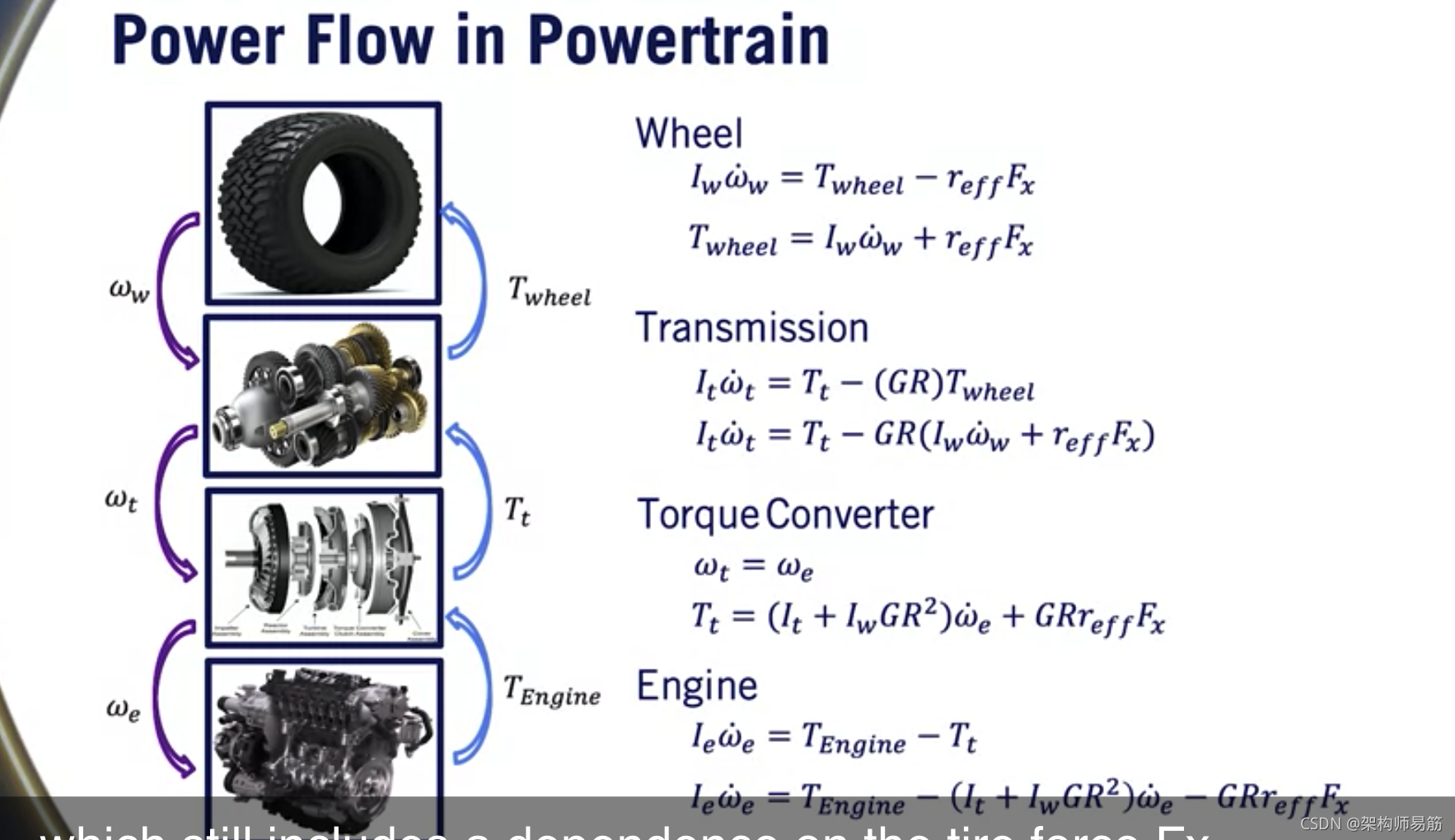
车轮是来自动力传动系一侧的扭矩之间的交点, 以及由外部阻力作用的扭矩。
因此,我们可以通过 以下一阶微分方程:计算 车轮角速度ω w。 这里T轮是动力传动系产生的车轮扭矩。
我们可以使用这个微分方程求解车轮扭矩, 如果轮胎力 Fx 已知, 这可以从之前推导出的车辆纵向动力学计算。
车轮扭矩T轮实际上是 变速箱或变速箱的制动扭矩和输出扭矩, 如左侧可见。
我们将在稍后的视频中查看中断建模, 我们将专注于本视频的动力传动系统。
施加到变速器的扭矩称为涡轮扭矩 T sub t, 来自将发动机连接到变速箱的变矩器。
回想一下涡轮机的角速度 omega T 变矩器通过齿轮比 GR 与车轮角速度相关。
因此,我们可以定义一个类似的常微分方程 涡轮角速度作为我们的传动动力学模型。
此外,我们可以用我们的表达式替换车轮动力学模型中的 T 轮。 接下来是变矩器。
在实践中,该变矩器具有 复杂的动态,因为它有多个支柱和 通过叶轮的流体 允许发动机的耦合和解耦。
当耦合时,我们可以假设 涡轮角速度与发动机转速几乎相同。
因此,我们将涡轮速度替换为发动机角速度 传动模型形成一个包含变矩器的动态模型。
最后,我们可以通过包含发动机动力学来定义完整的动力传动系统模型。
发动机惯性项等于发动机产生的扭矩 燃烧过程减去来自变矩器的涡轮扭矩, 这仍然包括对轮胎力 Fx 的依赖。
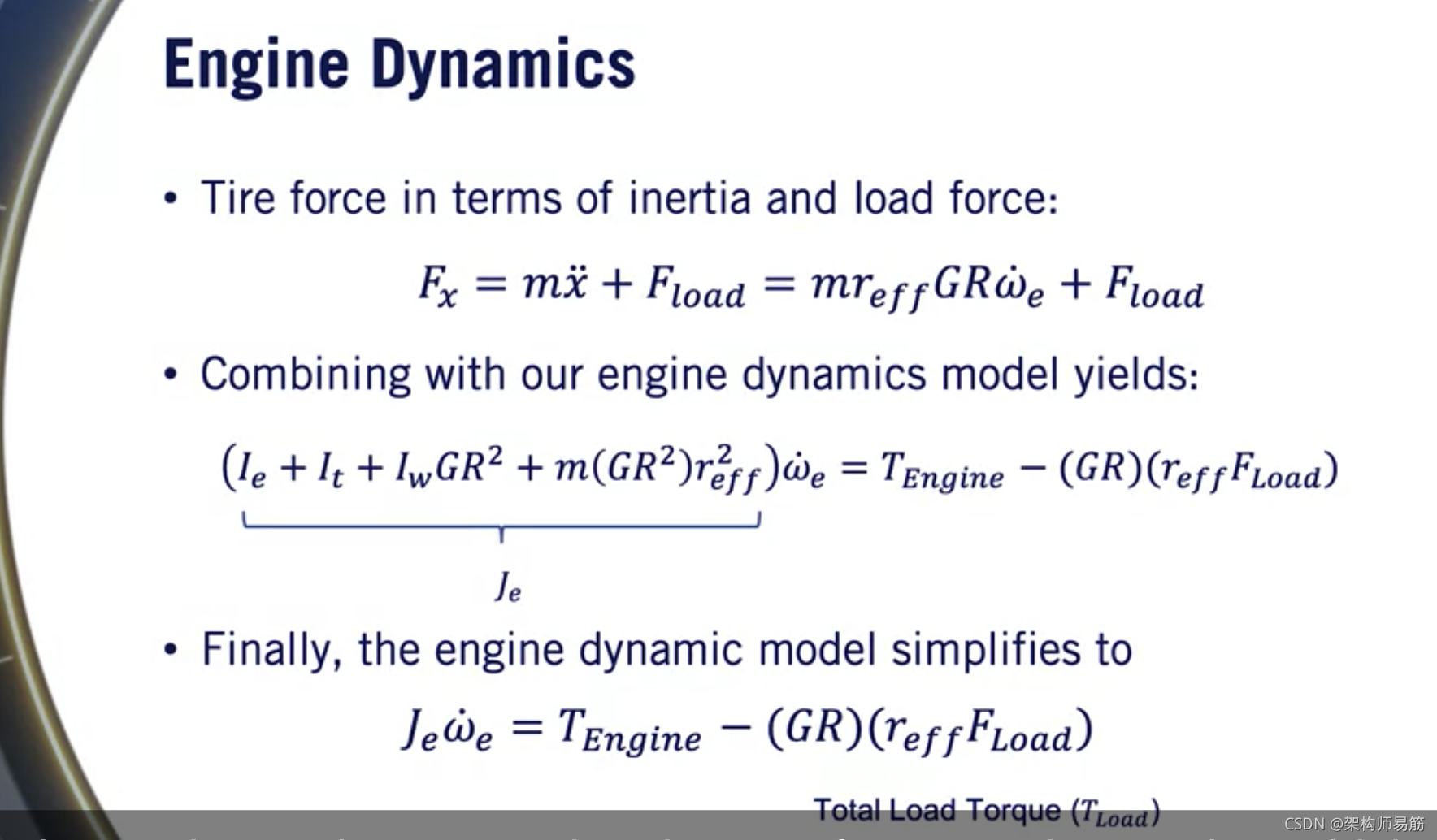
如果我们回到原来的纵向车辆模型并求解轮胎力, 我们看到对发动机旋转加速度的进一步依赖, 可以与引擎中的术语分组, 传动和车轮惯性。
我们现在形成完整的动力传动系统模型并定义 有效的动力传动系统惯量是所有单独部件惯量的总和, 我们将其称为 J sub e. 动力传动系统模型简化为以下等式,它平衡了发动机扭矩 T engine 与 驱动的总负载转矩 T load 发动机加速度,从而汽车纵向加速度。
最后的等式实现了我们的目标, 因为它全程展示了整个动力总成系统的动态 从发动机到作用在车辆上的外部阻力。
我们仍然需要将发动机扭矩与油门踏板位置联系起来, 和制动踏板位置的制动扭矩, 我们将在有关执行器建模的视频中介绍。
在这个视频中总结一下, 我们为车辆纵向动力学和阻力定义了一个紧凑的模型。 我们描述了典型的动力传动系统组件并为它们导出了动态模型, 我们将这些子系统的强制模型组合成 单一统一的纵向动力模型 适用于速度控制开发。 在接下来的视频中, 我们将研究建模中横向动力学的细节 以帮助开发转向控制器。回头见。
第 4 课补充阅读:纵向车辆建模
补充阅读:纵向车辆建模
要了解有关纵向动力学和车辆传动系统的更多信息,请阅读以下教科书的第 4 章:
Rajamani R. (2012) “纵向车辆动力学”。在:车辆动力学和控制。机械工程系列。马萨诸塞州波士顿斯普林格。http://link.springer.com/content/pdf/10.1007%2F978-1-4614-1433-9_4.pdf。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/V8htX/lesson-4-longitudinal-vehicle-modeling

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐
 0
0 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)