
自动驾驶 5-2 使用 PID 进行纵向速度控制 Longitudinal Speed Control with PID
gear: 齿轮throttle:减速, 节流阀torque:转矩gentle longitudinal maneuvers:细致巧妙的移动第 2 课补充阅读:使用 PID 的纵向速度控制补充阅读:带PID的纵向速度控制要更深入地了解纵向控制,请阅读以下教科书中的第 5 章(第 123-150 页):R. Rajamani,“纵向控制简介”,载于:车辆动力学和控制,机械工程系列,https ???
gear: 齿轮
throttle:减速, 节流阀
torque:转矩
gentle longitudinal maneuvers:细致巧妙的移动

在此之前的视频中,我们欢迎提出一个关于数学的上数学 我们简要地回顾了PID控制器的设计和经典控制器的设计。 在本视频中,我们将PID控制应用到我们的纵向汽车模型。 那么,在本视频结束时,您将能够 定义整个汽车规划和控制架构,并设计一个 基于PID的控制器来调整巡航控制的参考速度。
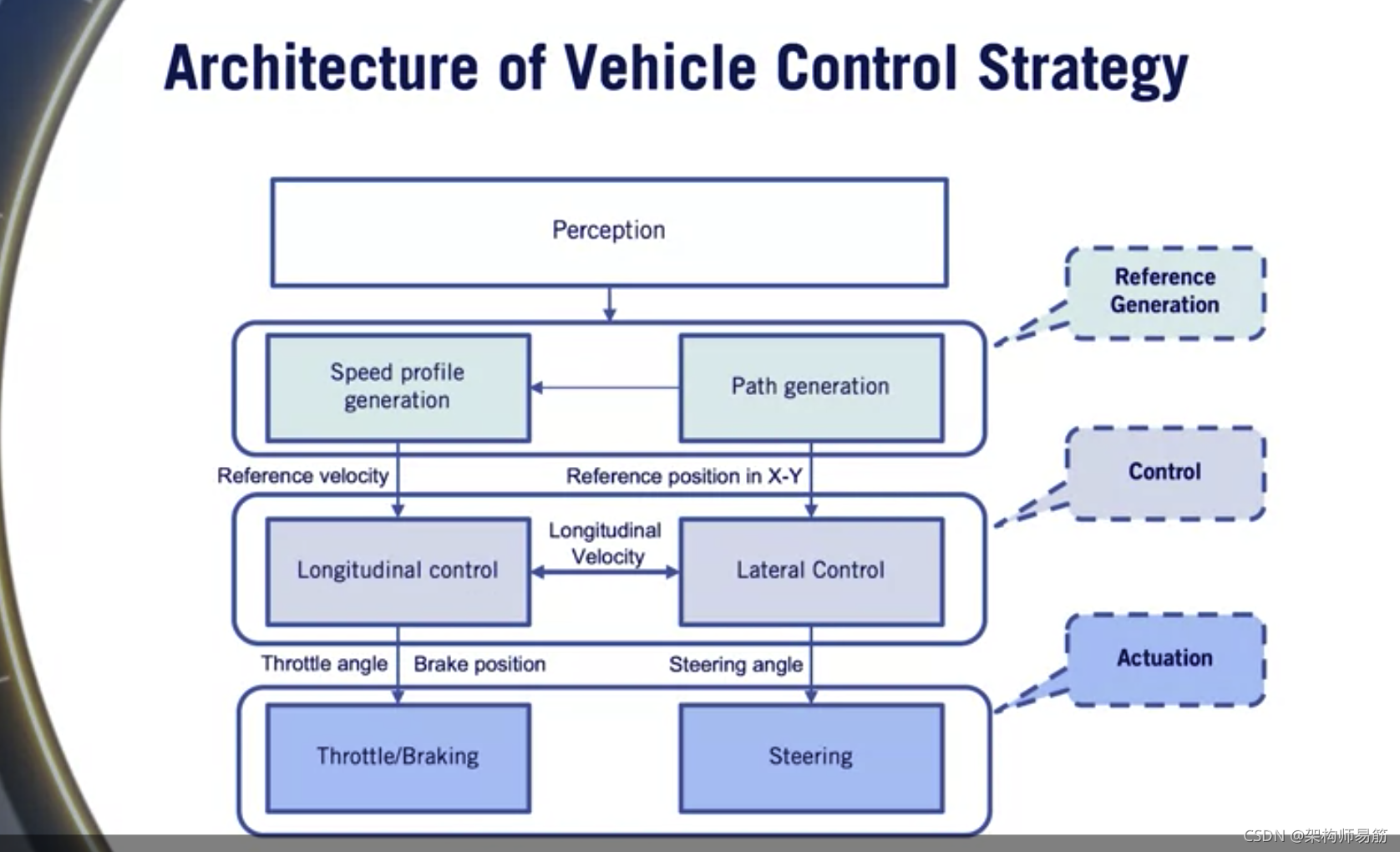
让我们仔细看下汽车控制体系结构, 和它如何整体自动化软件栈。 我们可以把这个结构划分为四个部分。 这些部分互相联系。
- 第一个部分是道路和环境的发现。 看来是参考由传感器获取并为系统产生输入。
- 在第二层, 路径生成和速度曲线生成, 这在汽车生命里被成为了过去的生命周期。 这些配置是通过运动规划过程生成的, 我们会在这个专题的第四课介绍。
路径和速度轨迹是控制器需要的参考输入。 对纵向控制,定义设定点的 降速和减速度,是我们能够准确追踪必须要的。 对于自动驾驶车的侧向和纵向控制, 唯一的任务就是合理的地项目计划, 以及相应地降低实际和速度值之间的参考路径。 自动驾驶要求的其他任务由系统的其他部分完成。 最终,控制器生成给汽车的输入指令和执行机构信号。 正如我们在前面的模块中所看到的, 这些包含侧向控制的方向控制 和纵向的油门和刹车控制指令。
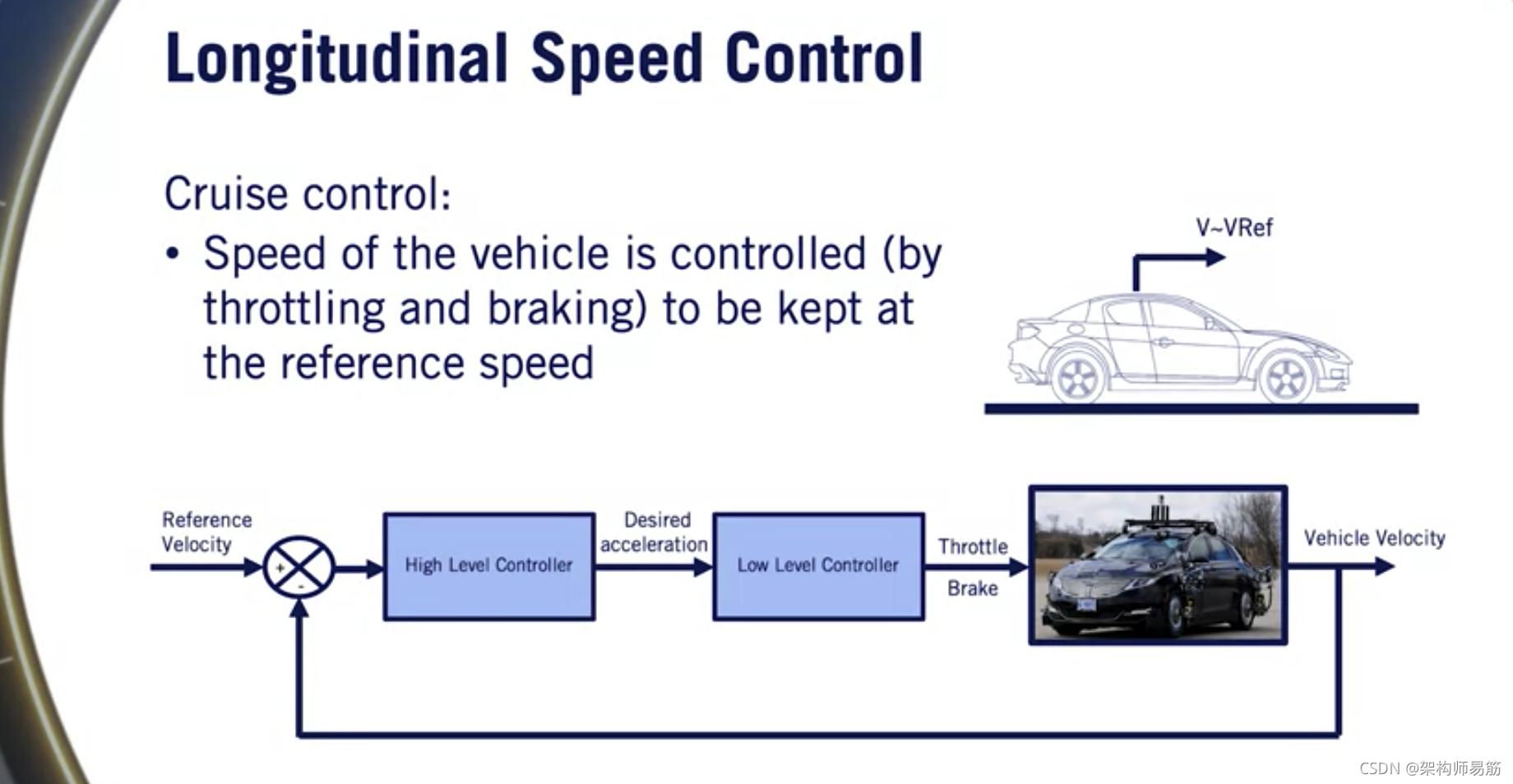
让我们看一个纵向汽车控制的例子。 汽车控制里常见的控制应用是什么 在普遍高速时的控制控制。 巡航控制系统执行的功能是 保持速度在驾驶者指定的固定参考速度, 以及加速和旅游到一个驾驶者指定的新参考速度。 当汽车制于不同的路况和阻力, 油门角度会随着巡航控制改变。 现在系统拥有增强的功能,习惯习惯控制, 其可以改变参考值,基于的是 测量前面的领航车和一个半自动系统。 又如交通堵塞助手, 可以通过 车辆速度释放创造车辆并线的演奏空间。 这些扩展的例子需要额外的控制器设计 处理更宽广的操作点。 该角色显示了巡航控制器和工厂车辆模型 成为一个闭环系统,保持保持 车辆速度接近参考速度。
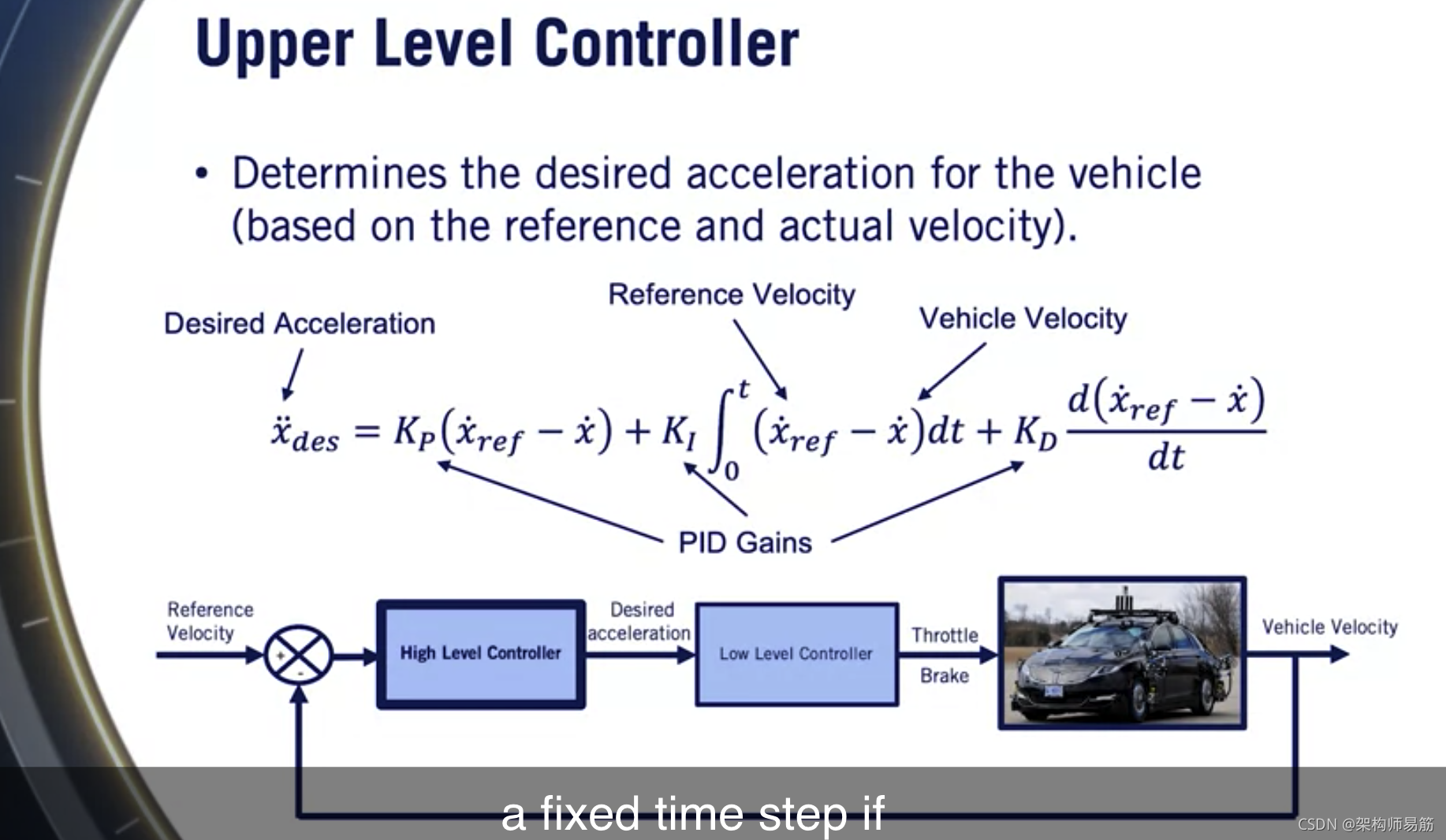
控制可以分为两个等级; 一个高级和一个低级别的控制器。 低级控制器对控制任务并不重要。 高级控制器接收 设定点速度和车辆实际速度的差值, 并产生需要的婴儿,以缩小间隙。 低层控制器获取车辆和和 生成和执行油门或刹车行为,以跟踪参考教程。 在实践中,这两个阶段的方法允许我们利用pid控制, 还能直接加入限制和配置在指定的汽车推广上 以保持速度。 允许我们单独使用 我们上一讲学习到的引擎图 产生的空气 从巡航控制输入响应的引擎状态。 让我们仔细看看高级控制器。 上层或高级控制器确定了 需要多少时间步长,才能达到速度。 让我们在这里应用PID控制器, 它在连续时域中表示。 车辆控制器的输入是速度表现, 输出是车辆所需的。
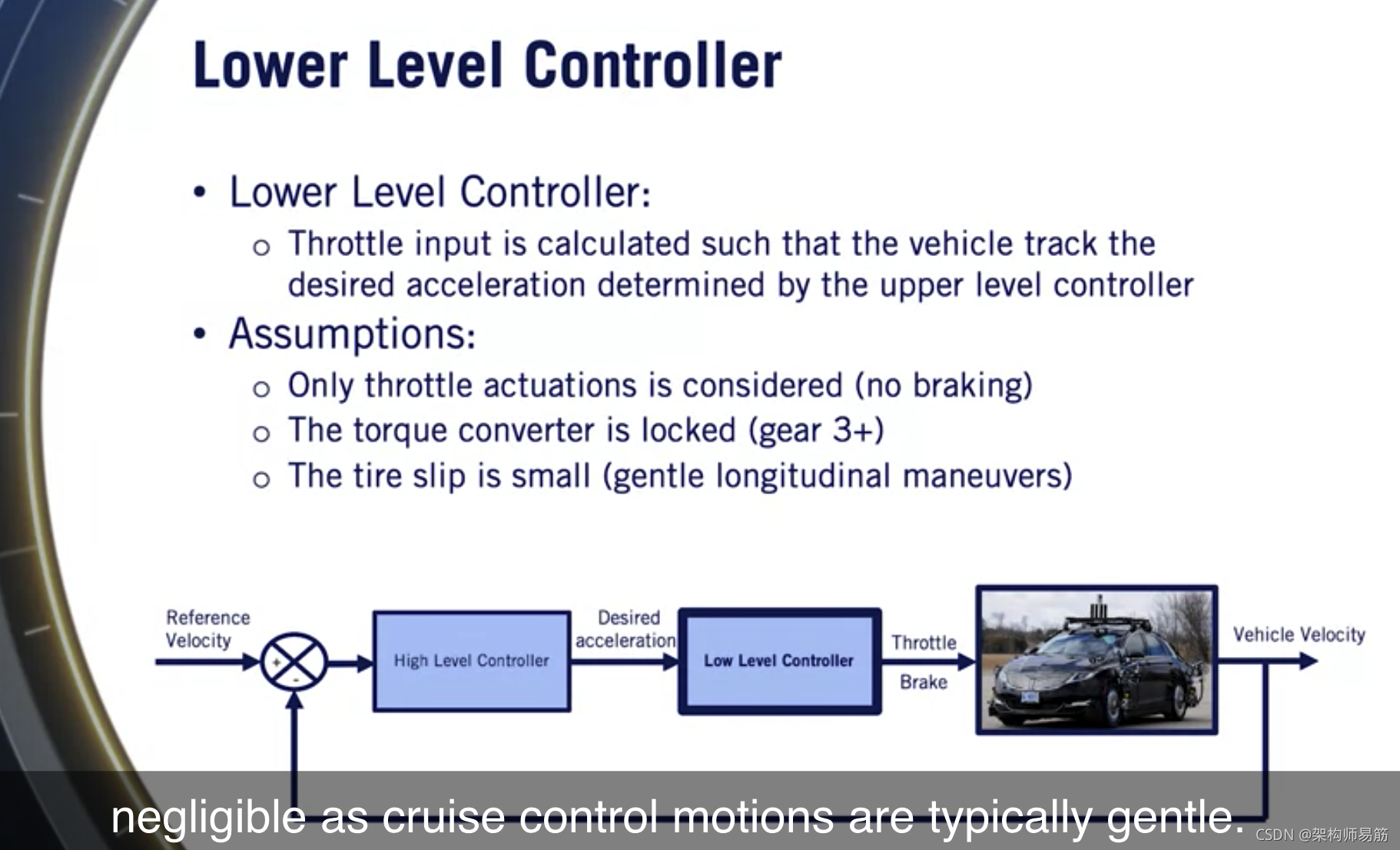
在前面的课程中, 我们学习了如何设计PID控制器并研究 增益不同影响控制器的性能。 为了在软件中实现自己的控制, 我们将控制器离散化, 将积分改变为固定时间步长的求和。 导数项可以用有限差值近似 在固定时间步长上,如果 参考参考或估计的语言不可用。 低层控制器生成油门和油门信号, 以吸引由高层控制器计算的需要。 在设计低层控制器时, 我们其实有些简化了我们的问题。 我们可能只需要油门就可以 控制车辆的速度,在巡航控制过程中, 司机可能会介入,需要提前预防事故发生。
我们假设我们在三档或 非常高级的操作,伪装变矩器被锁定, 这意味着来自的信息 直接通过传输而没有损失, 我们真实的滑移角和动画 以忽忽不计,因为巡航控制运动是通常的。 低层控制器需要从高级控制器产生需要的蛋糕 通过增加或产生的气体。 这由油门开角控制, 但受动力能量和能源图的支配, 这对于经典的控制方法可能是一个挑战。
相反,需要的转化为能量需求, 然后将能量转化为油门开的命令。 回想一下前一个模块,我们进行了 二阶常微分充满 描述车辆的兔子 在性能和性能之间的差异。 我们可以重练该等式,以溶解期待的呼吸, 在给定已知的负载和车辆的需求的情况下。 然后, 发电机引擎图, 在不同操作点测试时产生的,可以 用于确定油门的开角, 由所需能量产生量的。 在这些标准下, 期望的性能和当前状态 RPM定义了需要的油门的位置, 当下需要时进行插值。 我们方法是一种数据驱动的近似, 但它在实际中效果很好。
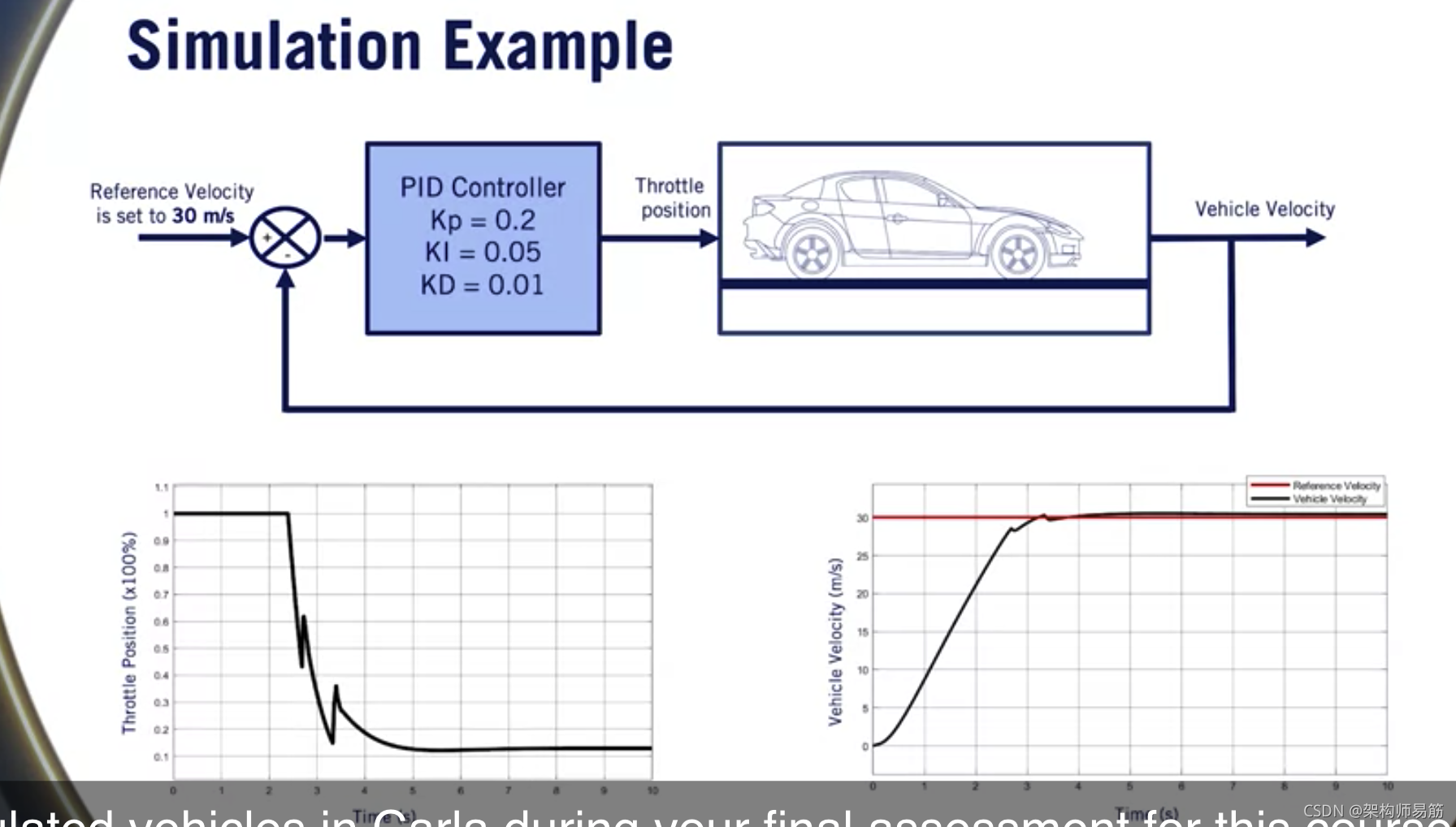
近似来自以下事实: 下面的数据点是点,而 动力传动系统不断变化 其工作点当前的驾驶条件。 我们可以将车辆控制器的个别组合, 并模拟控制响应,以便 通过PID控制器实现动态车辆模型所需的阶跃变化。 通过实验研究调整PID得益,使车速遵循 30m/s 或者 108 km/h 的参考速度。 在结果下,左下, 我们将油门开度了, 是车辆对油门的指令。 在右下,我们看到的具体速度如何随时间安排, 并在稳定时间后达到参考速度。 由于柴油图, 我们看到了一些有趣的假象 在车辆响应中,因为它更接近参考速度。 你会看到更有趣的效果 在Carla的模拟车辆中,在本课程的最终评估期间, 太不适合对纯PID控制造成了巨大的挑战。
在这段视频中,我们介绍了 巡航控制系统的纵向速度控制概念。 这是在设计控制器的第一个情况, 对自动驾驶车这个去遵循期望的前进速度,在课程中。 我们学习了高层和低层控制器的概念, 并使用PID控制和引擎图的组合来调节车辆速度。 在下一个视频中, 您将学习如何应用前馈控制,以提高 纵向控制系统的性能。
第 2 课补充阅读:使用 PID 的纵向速度控制
补充阅读:带PID的纵向速度控制
要更深入地了解纵向控制,请阅读以下教科书中的第 5 章(第 123-150 页):
R. Rajamani,“纵向控制简介”,载于:车辆动力学和控制,机械工程系列,https://www.springer.com/cda/content/document/cda_downloaddocument/9781461414322-c1.pdf?SGWID=0-0-45-1265143-p174267791(2006)。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/6qs1g/lesson-2-longitudinal-speed-control-with-pid

瓜分20万奖金 获得内推名额 丰厚实物奖励 易参与易上手
更多推荐
 0
0 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)